Research in offshore transfer cargo operations; challenges, developments, and new frontiers
DOI:
https://doi.org/10.25043/19098642.56Keywords:
offshore operations, nonlinear control, load manipulator, cargo load transferAbstract
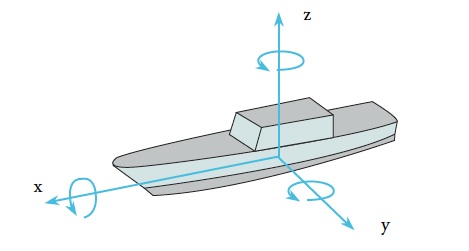
Currently, offshore operations are considered activities with high impact on the economy, which standsin direct relation to the products of great importance and value for diverse economic sectors. Thus, itbecomes necessary to implement new technologies that make the manipulation of these products fasterand easier. In this work, the authors introduce the problem in offshore cargo transfer operations. Thisproblem involves different kinds of areas: logistics, dynamics, and control are some of them. The authorspresent an approach for the last two. In the dynamic problem is presented a study on the dynamics of asuspended load connected to a crane via a mechanism with two prismatic degrees of freedom. The studiesshow the complex large-amplitude motion of the load given the visibly nonlinear behavior of the ship.Therefore, the development of a fuzzy controller was necessary to decrease oscillations and position theload in one definitive point of interest. The work presents the test results, demonstrating that this typeof manipulator in combination with an effective control strategy allows for the reduction of oscillationsin offshore activities.
Downloads
References
ABBOD, M. F., MAHFOUF, M., KEE, C. H., 2000, Fuzzy logic-based anti-sway control design for overhead cranes. Neural computing and applications.
DONGBIN, Z., DIANTONG, L., JIANQIANG, Y. 2004, Adaptive sliding mode fuzzy control for a two dimensional overhead crane. Mechatronics.
DUTRA, M. S., LACHE, I. S., PRIETO, L. D. 2008. New technique for inverse kinematics problem using Simulated Annealing. EngOpt 2008. Rio de Janeiro. Brazil.
FOSSEN, T. 1994. Guidance and Control of Ocean Vehicles. JohnWiley and Sons, New York.
GROOM, N., ROBINNET, D. 2002. Pendulation control system and method for rotary boom crane. Patent No US 6,442,439 B1.
JIE, L., GUANGFU, S., KLEEBERGER, M. 2005. Complete dynamic calculation of lattice mobile crane during hoisting motion. Mechanism and machine theory.
MAN BW DIESEL A/S. 2005. Propulsion trends in container vessels. Man BW diesel a/s industrial manual reference.
NOTTEBOM, T. 2004. Container shipping and ports: An overview. Review of Network Economics.
SPHAIER, S. H. 2005. Hydrodynamics. Federal University of Rio de Janeiro.
VERSCHOOF, J. 2002. Cranes - Design, Practice and Maintenance. Professional Engineering Publishing Limited. London and Bury St Edmunds UK.
YANG, K. S., YANG, J. H. 2006. Adaptive coupling control for overhead crane systems. Mechatronics.
Published
How to Cite
Issue
Section
License
The authors who publish in this Journal certify that:
- The work submitted for publication in The Ship Science and Technology journal, was written by the author, given that its content is the product of his/her direct intellectual contribution.
- All data and references to material already published are duly identified with their respective credits and are included in the bibliographic notes and quotations highlighted as such.
- All materials submitted for publication are completely free of copyrights; consequently, the author accepts responsibility for any lawsuit or claim related with Intellectual Property Rights thereof, Exonerating of responsibility to The Science and Technology for the Development of Naval, Maritime, and Riverine Industry Corporation, COTECMAR.
- In the event that the article is chosen for publication by The Ship Science and Technology journal, the author state that he/she totally transfers reproduction rights of such to The Science and Technology for the Development of Naval, Maritime, and Riverine Industry Corporation, COTECMAR.
- The authors retain the copyright and transfer to COTECMAR the right of publication and reproduction of the work which will be simultaneously subject to the Creative Commons Attribution License (CC -BY) , which allows the license to copy, distribute, display and represent the work and to make derivative works as long as it recognizes and cites the work in the manner specified by the author or licensor.
- For more information about the Creative Commons Attribution License (CC -BY) and his use and scope, please visit the following web page https://creativecommons.org/licenses/by-sa/4.0/legalcode