Project and Construction of Oceanographic and Faisheries Research Vessels in Spain
Proyecto y Construcción de Buques Oceanográficos y de Investigación Pesquera en España
José Fernando Núñez Basáñez1
Abstract
The objective of the paper is to analyze and present the specific and innovative characteristics of the multipurpose oceanographic vessels that are currently being built in Spain. The main requirement in these types of vessels is the low level of noise radiated to the water, Silent Platform, according to ICES 209, to satisfactorily exploit the evaluation of the Fishing Resources and its dynamic position capacity for operations with remote operating vehicles. These vessels are designed to carry out a wide range of research activities and have, therefore, the most modern facilities, laboratories, and equipment to undertake scientific missions in the different marine disciplines: Marine Geology, Physical Oceanography, Chemical Oceanography, Pollution, Marine Biology, and Fisheries.
Key words: Multipurpose Oceanographic Vessels (MOV), Noise radiated, Marine Scientific Missions (MSM)
Resumen
Con este trabajo, se pretende analizar y presentar las características específicas e innovadoras de los Buques Oceanográficos Multipropósito que, actualmente, se están construyendo en España. El principal requerimiento en este tipo de buques es su bajo nivel de ruido radiado al agua, Plataforma Silenciosa, de acuerdo con ICES 209, para explotar satisfactoriamente la evaluación de los Recursos Pesqueros y su capacidad de posición dinámica para operaciones con vehículos de operación remota. Los buques son diseñados para llevar a cabo un amplio rango de actividades de investigación y disponen, por tanto, de las más modernas instalaciones, laboratorios y equipos, para realizar misiones científicas en las diferentes disciplinas marinas: Geología Marina, Oceanografía Física, Oceanografía Química, Contaminación y Biología Marina y Pesquerías.
Palabras claves: Buques Multipropósitos Oceánicos, Ruido radiado, Misiones Marítimas Científicas
Date Received: December 2nd, 2010 - Fecha de recepción: 2 de Diciembre de 2010
Date Accepted: March 6th, 2012 - Fecha de aceptación: 6 de Marzo de 2012
________________________
1Escuela Técnica Superior de Ingenieros Navales. Universidad Politécnica de Madrid. Doctor Ingeniero Naval. Catedrático de Universidad. Madrid, España. e-mail: josefnunez2005@hotmail.com
............................................................................................................................................................
Introduction
Oceanographic ships are research vessels designed to collect quantitative data from the sea surface, its depths, the sea floor, and the overlying atmosphere. Their primary purpose is to transport scientists and increasingly sophisticated equipment to and from study sites on the ocean's surface, and in some cases below the surface. The ships must have the ability to lower and retrieve instruments by using winches and wires. The ship's equipment and instrumentation must precisely determine the location on the sea surface, and provide suitable communication, data gathering, archiving, and computational facilities for the scientific party.
The requirements list includes seakeeping (seakindliness, a measure of the ship's responses to severe seas; and station-keeping, the ability of a ship to maintain its fixed location on the sea surface); work environment; endurance (range, days at sea); scientific complement (number of researchers accommodated); operating economy and scientific effectiveness; subdued acoustical characteristics; payload (scientific storage, weight handling); speed; and ship control. These requirements often conflict; thereby, necessitating compromise.
Ships can typically be considered within three major groups based on use: general purpose (classical biological, physical, chemical, geological, and ocean engineering research, or a combination); dedicated special purpose (hydrographic survey, mapping, geophysical, or fisheries); or unique (deep-sea drilling, crewed spar buoy, or support of submersible operations). They can be used simply as delivery and support systems for exploratory devices, such as floats and bottom landers, as well as crewless remote operating vehicles (ROVs— tethered, powered, surface-controlled robots), or autonomous underwater vehicles (AUVs—freely operating robots, using computer programmed guides).
In the world, fisheries and oceanographic research vessels are not very numerous. In Spain, oceanographic ships depend on two Government Agencies: the Spanish Institute of Oceanography (IEO, for its name in Spanish), and the General Secretariat of the Sea.
The IEO, which belongs to the Ministry of Education and Science, is responsible for studying marine resources, problems related to Oceanography and marine pollution and crops. The Institute guides its research for the purpose of its results to support the consultant role and to respond specifically to the public function in relationship to the sea, rational use, and protection. Given its characteristic as a State authority, the IEO represents the Spanish Government in International Oceanographic Commissions and Organizations. To date, the IEO has six ships and two more are under construction.
The General Secretariat of the Sea, which belongs to the Ministry of the Environment, Rural and Marine, MARM, has three fishery and oceanographic research ships. MARM obtains accurate and reliable data to evaluate the state of stocks, resource, and seabed, as well as data for the preparation of fishing maps of the Spanish continental shelf and the stocks of fishing grounds of interest to the Spanish fleet.
Definition And Characteristics of the Vessels
Scientific Missions. General Arrangement
These vessels were designed for a wide range of research activities in the Spanish coastal and regional area, as well as in other more remote areas. Each vessel is qualified to develop multi-purpose research and provides basic facilities for the marine disciplines of the coastal and regional areas:
Marine Geology: Study of the seabed and structure of the bottom, through sample collection and analysis.
Physical Oceanography: Study of the movement of water masses. Thermal measurement and sea water acoustics and optical properties. Description of basic properties of the ocean, such as: boundary coastal conditions, water depth, seabed profile, etc., and study of the variation of the properties of seawater.
Chemical Oceanography: Chemical analysis of particulate matter in suspension in sea water; including polluting agents.
Marine Biology and Fisheries: Collection and analysis of phyto and zooplankton, fish, other marine species, etc.; benthonic and pelagic sampling. Ecosystem integrated studies. Fishery research and stock assessment by acoustic means.
Pollution: Observation and measurement of marine pollution, atmospheric air and water analysis. Collection of polluting agent samples.
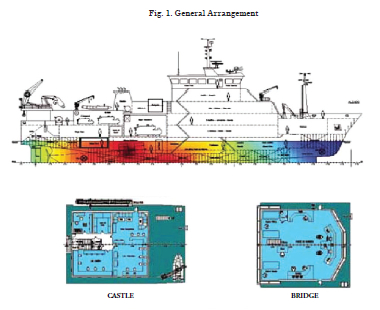
Fig. 1 presents the general arrangement of oceanographic ship Miguel Oliver. In the deck sections, it can be seen that different facilities and compartments are arranged according to their function. Thus, on the lower deck or double bottom are most of the systems and naval equipment; in it, there is space for the engines, alternators, pumps, and compressors. The Fishing Park, the Biology Laboratory (due to the advantages resulting from this location for their activities) and cabins for crew and scientists are located on the main deck. The Upper deck will be mainly dedicated to research activities. The remaining laboratories will be located in this deck, as well as the galley, dining room, and pantry. This working area will be located aft on this deck. The Deck castle also serves for accommodation, nursing, conference room, and cabins for the captain and chief engineer. The navigation bridge is loactaed above the castle deck.
Along the ship length, areas more aft are dedicated to work and research activities; whereas, the more fore areas are dedicated to hotel and crew leisure activities.
Hull Shape and Appendages
Demands for speed, fuel economy during the exploitation of the ship, and low hydrodynamic noise level lead to choosing fine and very slender forms with a prismatic coefficient of 0.62 - 0.65.
Low noise requirements make imperative a very soft water run to promote a uniform flow of entry to blades, without separation and vortex generation.
The bow flare will be accentuated to improve seakeeping and habitability in this area. The waterplane entrance half-angle should be low (no more than 18°) to minimize resistance by wave formation and, thus, achieve the speed ordered with the least possible power.
The ship will have a transom stern to increase the volume of this area for the greatest possible useful space.
At the bottom of the hull a retractable keel is installed, which hangs a gondola where transducers for acoustic detection and control of other equipment are installed. Being 4/4.5 m away from the ship, the vibration and noise reduction generated by the vessel allows reliable assessments of fish stocks. As an additional provision, the retractable keel allows operations for repair and replacement of equipment without the need to take the ship out of the water (Fig. 2).
The pod does not have to be affected by air bubbles. Transducers have to protrude below the boundary layer. The drag of this equipment has to be minimized, as well as the hull pressure fluctuations and cavitation inception.
Diesel-Electric Propulsion
The propulsion power is provided by generators located in total isolation, actuated by diesel engines that feed to electric motors coupled to the propeller axes. A diesel-electric installation consists of one or more engines coupled to an equal number of generators that supply power to the engine or electric motors responsible for propulsion (Fig. 3).
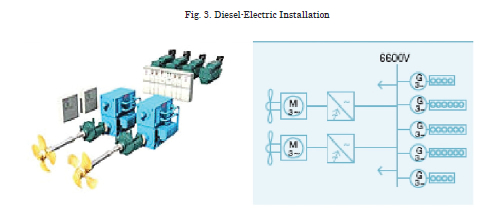
Diesel engines are irreversible, i.e., they always rotate in the same direction; for that reason, their construction is simpler. The rotation regime is between 250 and 600 rpm and the current used can be direct or alternating. Regulating speed of the propulsion engines, when they are DC, is performed by acting on excitation of generators by resistors turning these generators at constant speed and, when several generators feed a same engine, their excitations are connected in parallel for unified command. For the regulation of speed with alternating current, it acts on the resistors of excitation, engine, and alternator.
From the acoustic point of view, this propulsion system allows for silent navigation with respect to instruments detection and evaluation of 'stock' of marine species. This ensures that research teams get their readings free from vibration and noise.
Dynamic Positioning System
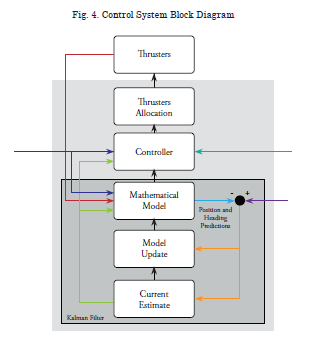
Dynamic positioning (DP) systems enable, through the integration of multiple on-board systems, obtaining precise maneuverability for a ship under changing conditions. DP Systems can be defined as systems that automatically control the position or direction of a ship by using active thrust devices. DP keeps the ship heading in a fixed point or makes it maneuver accurately. DP also provides monitoring or other positioning or precise movement needs.
Sensors connected to different elements (anemometers and windmills, wire tensors, pressure gauge monitors, etc.) allow direct feedback of these "external" forces and, thus, feed the DP system so the necessary corrections can be made by using the propulsion. The system connected to differential GPS equipment commands two transverse thrusters, as well as the main propeller and the active rudder.
A computer-controlled system automatically maintains the position of a ship by using its own propellers and thrusters. The software contains a mathematical model of the boat, which includes information related to the wind and current drag of the vessel and the location of the thrusters. This knowledge, together with the sensor information allows the computer to calculate the rudder angle and the suitable rpm for each propeller.
Sensor position of reference, in combination with wind sensors, sensors of movement and compass signal provides computer information related to the position of the vessel and the magnitude and direction of environmental forces affecting its position.
Fig. 4 presents a block diagram of a control for a dynamic positioning system.
Scientific Equipment
The vessels are equipped with the following scientific equipment, appropriate to the tasks described above:
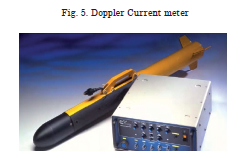
Doppler Current meter and Profiler, (150 kHz) for current monitoring in specific sections of the water column, measuring the following parameters: direction and speed, temperature and pressure. Installed in the retractable keel. Fig. 5 shows some models of this instrument.
Complete Meteorology station, which includes at least sensors of air temperature, humidity, radiation, speed and direction of wind, and water temperature. The water temperature sensor will be assembled in the retractable keel to facilitate its access and maintenance.
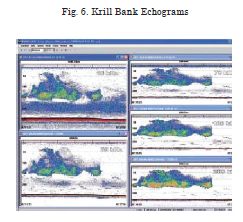
Multi-frequency Biological Sounder. It is now an international standard for the scientific evaluation of fishing resources. The system allows knowing the size of targets starting from the echo intensity received and, hence, knowing the distribution of sizes of individuals and fish biomass bank. Fig. 6 shows a screen with several echograms corresponding to a bank of krill; records allow comparing frequencies used in the response: 18, 38, 70, 120, and 200 kHz. It will be installed in the retractable keel.
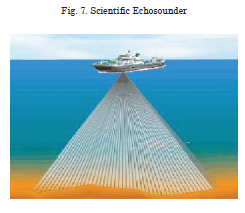
Multi-beam Scientific Echosounder. Its role will be to increase precision in the biomass estimation and the definition of structures of the fishing banks and their dispersion when detecting the vessel presence. It will be installed in the retractable keel.
This probe can incorporate a bathymetric option through which a high-resolution bottom map can be elaborated (Fig. 7).
Multi-frequency Hydrographic Echosounder. Its function is to determine the depth of the sea and discover the features of the seabed in the portion of acoustic energy reflected by the bottom. It will be compatible with the previous equipment.
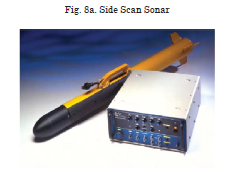
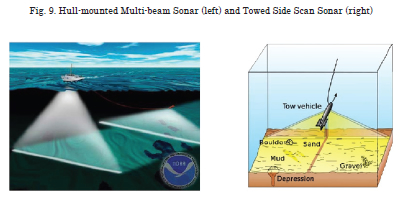
Side Scan Sonar. Uses a sonar device that emits conical or fan-shaped pulses from a torpedo or "dragged fish", towards the seafloor across a wide angle perpendicular to the path of the sensor through the water. The equipment may be towed from a surface vessel or submarine, or mounted on the ship's hull. The signal to be returned after bouncing off the bottom builds an acoustic image of the bottom or phonograph, which informs us about the morphology of the seafloor (Figs. 8 and 9).

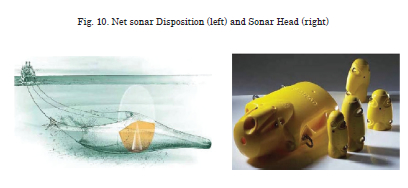
Net Sonar; towed with trawl riding 1500-m driver cables with double armored steel coating. The Net Sonar is capable of detecting the shoal found at the mouth of the net used in large-scale pelagic trawls. Provides real-time images from the information received from the sonar head (Fig.10).
Hull Hydrophones; connected by cables to the winch’s control zone. One or two hydrophones oriented towards the stern of the ship, paying particular attention to the location away from the noise generated by the ship’s propellers (Fig. 11).

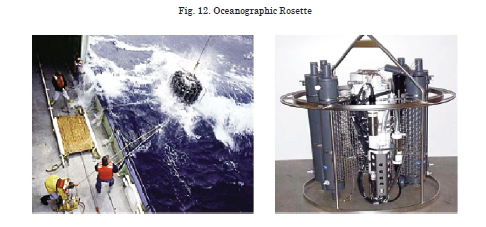
Sampling Equipment. During each oceanographic campaign, samples are taken at different depths to, subsequently, determine the various parameters of the water (salinity, oxygen content, temperature, turbidity, etc.) through analysis and through the quantity of suspended matter (nutrient, phytoplankton and zooplankton, etc.). To sum up, the main components of this equipment include:
Oceanographic Rosette. A carousel water sampler, which integrates all the devices is used for sampling. It dives into the sea through a specific trawl located on the deck (Fig. 12).
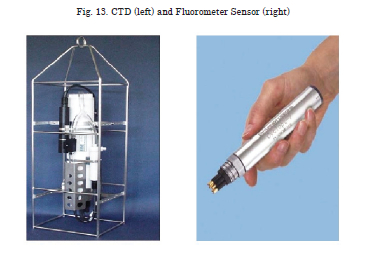
CTD. It is the acronym for conductivity, temperature, and depth. It is the primary tool for determining essential physical properties of seawater, giving scientists a precise and comprehensive charting of the distribution and variation of water temperature, salinity, and density that helps to understand how the oceans affect life. The CTD mounted sensors will measure up to 6 different parameters: dissolved oxygen, CO2, fluormeter, turbidity meter, radiometer, and pH/ORP (pH + Redox potential) (Fig. 13).
Niskin Bottle. It is a tool widely used in Oceanography to sample water at different depths. Opening and closing of bottles can be done manually, through a steel cable and a counterweight to lead. Often, in sea launching from oceanographic vessels, Niskin batteries are joined in a rosette with which various bottles at different depths are filled (Fig. 14).

Van Veen Dredger. It allows the collection of sediment from the vessel. All Van Veen Dredges have the same operation mode: the clamps are open, held by a hook, and slowly enter the water and upon touching the sea bed, the hook is liberated and the clamps close, leaving the sample inside. (Fig. 15).

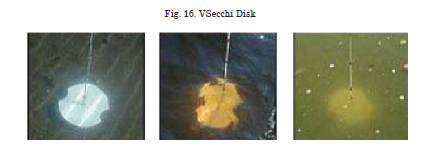
Secchi Disk. Water transparency is determined by using a Secchi disk; depending on the depth to which this disk will no longer be visible. Fig. 16 shows how the disk is used to measure water transparency.
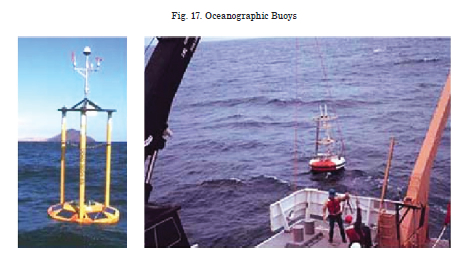
Oceanographic Buoys. According to the missions described in the corresponding section, oceanographic buoys are also necessary. Buoys must be stored on board near to the launching area. These buoys will be used for missions related to pollution, oceanography, and marine biology. To reach the place where the buoys must be anchored, they shall be hauled down with a davit located on the upper deck (Fig.17).
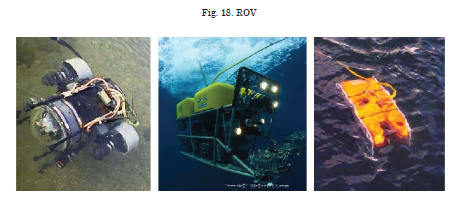
ROV (Remote Operated Vehicle). It is an unmanned tethered underwater robot, highly maneuverable and operated by a person aboard a vessel. It is linked to the ship by a tether (umbilical cable), a group of cables that carry electrical power, video and data signals back and forth between the operator and the vehicle. Most ROVs are equipped with at least a video camera and lights. Additional equipment is commonly added to expand the vehicle's capabilities. These may include sonar, magnetometers, a still camera, a manipulator or cutting arm, water samplers, and instruments that measure water clarity, light penetration, and temperature (Fig.18).
Data Management System. Regardless of the above, an integrated scientific data management system (MDM 400) will be installed (including a redundant server) with the ability to work integrated with different scientific teams, as well as oceanographic winches and the fishing winch control information.
Noise and Vibration
Noise transmitted to the water from a vessel, in form of vibrations, scare marine beings and can, consequently, affect the results of investigations carried out in the sea. It is therefore important to regulate and control these vibrations from the earliest stages of ship design. With this in mind, the ship must be designed to minimize air, structural, and radiated noise to the water. It must also comply with the requirements of Silent Platform ICES 209.
Sources that generate noise are primarily structural or hydrodynamic. Airborne noise also generates underwater noise due to vibrations induced in the hull. As the speed of the vessel increases, the contributions from these sources to the resulting noise increase. Therefore, a given speed must be set for noise level measurement. It is also normal to set at what distance from the hull induced pressure sound is measured, which typically is 1 m from the hull. Pressure levels are usually measured in decibels referenced to 1μPa.
Generated noise can have specific frequencies or a continuous form in the frequency spectrum. Among the first sources are unbalanced rotating elements, repetitive discontinuities like gears or blades of turbines or alternative movements of mechanical elements like pistons. The latter include cavitation or turbulence in pipes, valves or pumps and friction produced by sliding and shaft bearing
In vessels, the main sources of noise on board are propelling machinery, diesel generator groups, auxiliary machinery, and propellers. To achieve the low acoustic detectability platform design below summarizes a number of basic design criteria:
Selection of low-noise air and structural machinery. The main mission of these ships is to investigate the aquatic environment; therefore, acoustic signature requirements are high. This makes it convenient to take a dieselelectric propulsion system with direct coupled shafts. If adoption of gearboxes is required, they must have very strict manufacturing standards to reduce structural noise levels.
Selection of appropriate mounting propelling machinery and diesel generator groups. Once the machinery to be installed has been determined, it is necessary to define the type of mounting on which said equipment will be installed. Mounts can be simple, rigid elastic on a basis that is elastically attached to the engine-bearers of the motor and double elastic on a mid-term basis. On the other hand, to reduce airborne noise the machinery has to be isolated by means of acoustic wrapping.
Selection of appropriate flexible connections to connect the propelling machinery and the diesel generator group with the rest of the ship. To minimize the acoustic signature, flexible hoses between the different services (fuel, oil, cooling water, connections of expansion of air ducts for combustion and exhaust, etc.,) will be used.
Selection of auxiliary machinery which has a remarkable contribution to radiated noise, taking into account their noise vibration levels and airborne noise, as well as defining their elastic mounts properly.
Appropriate design of hydrodynamic forms of the hull and their appendages to minimize hydrodynamic noise and also obtain satisfactory wake distribution in the propellers.
Wake-Adapted Propeller Design, finding an appropriate radial load distribution to prevent the onset of cavitation in the speed margin required.
Application of new system based on masking noise radiated by the hull by using bubbles generated with compressed air.
To ensure compliance with the acoustic-dynamic objectives, the shipyard builder uses in-house noise and vibration personnel or may hire external personnel, has to carry out integral management of vibrations and noise, covering the following aspects:
1. Information and sensitivity awareness-raising of the shipyard and the main suppliers for the dynamic-acoustic criteria required for the ship.
2. Implementation of a protocol to prevent and minimize vibrations and noise.
3. Implementation, during early phases of the project, of tools and studies of vibration prediction, airborne and noise radiated to the water.
4. Establishment of a reception test program of components and/or main equipment in accordance with the dynamic-acoustic criteria.
5. Establishment of an inspection points program (IPP), to ensure control and periodic reviews of all aspects relating to vibrations and noise during the entire project and ship construction.
6. Implementation of a vibration, noise, and radiated noise measurement program during the sea trials to verify and, if necessary, certify compliance with established requirements.
Specific Requirements: Vibrations
Given the level of required comfort for these types of ships, a set of contractual limit values must be established for levels of structural vibration of the vessel, as defined in the COMF-VIB grade 1 Regulations (Bureau Veritas), or similar, for vessels of lengths less than 65 meters, in the following areas (Table 1):
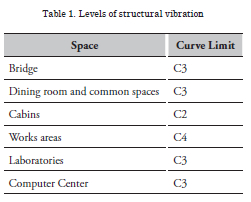
The vibration levels measured will be considered acceptable when they are below the curve defined for each location in Table 1.
Specific Requirements: Airborne
By considerations of comfort in the different locations of the ship for these types of vessels, contract limits are established, values for the noise level dB (A) depicted in the attached Table 2, which defines rules COMF - NOISE Ng = 1 (Bureau Veritas), or similar, for vessels less than 65 meters in length.
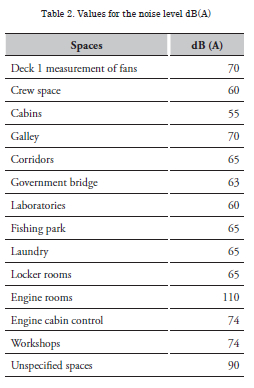
The noise level db (A), measured at different locations of the vessel, shall be considered acceptable when it is below the values defined in the attached table.
In general, the measuring procedure must comply with that specified by Bureau Veritas Regulations (Pt F, Ch.6, Sec. 2 ADDITIONAL REQUIREMENTS FOR NOTATION COMFNOISE), or similar applicable, and will run through calibrated sound level meters.
Specific requirements: Radiated noise
To date, research and observations have shown that noise generated by a ship has the potential to contaminate the sampling of populations or fishing banks, which confirms the need to build ships with low radiated noise levels. In this regard, research vessels must comply with the recommendations set forth in document ICES COOPERATIVE RESEARCH REPORT No.209 "Underwater Noise of Research Vessels Review and Recommendations".
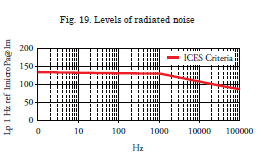
In particular, the Level of Radiated Noise Lp (1- Hz bandwidth), expressed in dB (referring to 1 micro Pascal) standardized 1 meter from the hull, whereas a spherical propagation and free running speed, must comply or be below for the two specified frequency ranges of values of the lines of the graphic attached (figure), whose laws of variation are as follows:
LP = 135 - 1.66 x log f (Hz) for the range of Hz to 1 kHz.
LP = 130 - 22 x log f (KHz) for the range of 1 KHz to 100 KHz.
While there are experiences that demonstrate the complete and final acceptance of the capacity of the ship to avoid potential problems of radiated noise it is required to execute measurements from more than one form and under different conditions, such as:
Trawling vessel condition with the codend at medium depth.
Trawling vessel condition with the codend in the background.
However, for contractual purposes of acceptance of ship, the Levels of Radiated Noise must comply, on both sides of the ship, with the ICES-209 criteria, specified above and included in the figure above, in free running condition.
Deck Equipment
Deck machinery, make used for scientific research task, is described in this section.
To drive the different components of deck equipment, electric systems, instead of hydraulic, are more convenient. Election of this driving type represents the following advantages:
Normally, Oceanographic ships are vessels with diesel-electric propulsion, this means that power generation capacity onboard is big and
it can be managed optimally.
• The hydraulic solution would require an
additional transformation of energy, with consequent losses resulting.
• Electrical machinery solution eliminates numerous pipelines, working under high pressure, of the hydraulic circuit, so this option reduces weight, as well as the disadvantages arising from leaking pipes.
• Electrical driving solution prevents many pipelines working under high pressure of
the hydraulic circuit, so this option reduces
weight, as well as the disadvantages arising
from leaking pipes.
• Eliminating hydraulic pipelines and hydraulic
pumps significantly reduces noise and
vibration levels.
• Repair and maintenance costs are lower for electric winches.
Winch Equipment
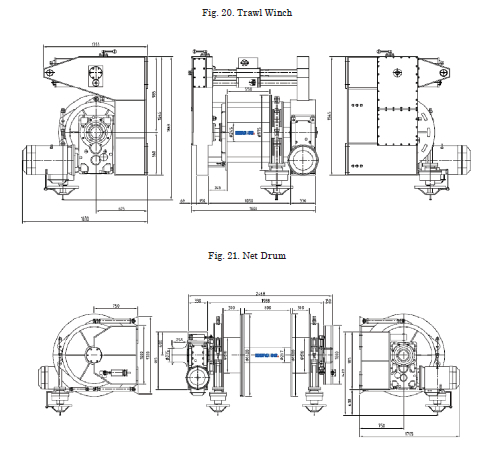
Trawl winches. Two winches are usually mounted, one each band, with a spindle capacity of at least 1500 meters. The winches should be compact, robust and with three speeds (Fig. 20).
Net drum. A double-net drum is assembled with a capacity of 2 m3 on each drum. One of the drums incorporates a sweep winch barrel on one side, while the other independent barrel is only for sweep (Fig.21).
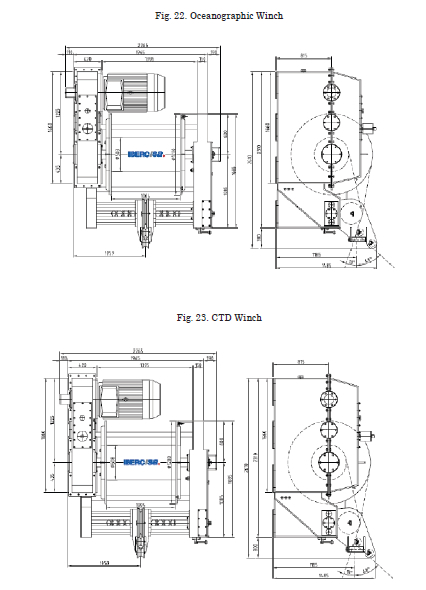
Oceanographic Winch. This winch is ready for handling different oceanographic equipments, as rossete, Niskin bottle, etc. The winch accommodates a 6,000-m long cable 8 mm in diameter (Fig. 22).
A command and control system by variable frequency drive is included. On the bridge, a control console is located, including: joystick twist control, potentiometer for traction regulation, indicators in meters shooted and dynamic traction on the wire.
To operate with the CTD, it has a special Oceanographic winch, incorporating a manual control and two remotes, one on the government bridge and one wet laboratory. (Fig. 23).
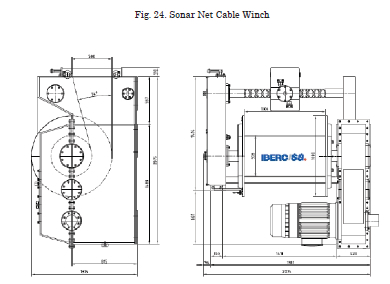
Sonar net cable winch. This winch will be placed on the cover Castle, looking aft (Fig. 24).
Other Deck Equipment
These vessels are generally below the deck equipment:
A collapsible davit is aft for fishing operations, oceanographic research, and to manipulate the ROV. It consists of a single foot structure made up of two main elements that allow 360-degree rotation. This upper arm has a perpendicular arm 3 m in length. The maximum rotation of the intermediate support is 45 ° forward and 75 ° backwards.
A crane for loading and unloading located in the spar deck. It is 16 m long and has a 5-ton capacity at 16 m and with a winch of equal strength. This equipment allows total autonomy to develop any operation without crane ports, transport trucks or other equipment. Enjoying a considerable interest in the actions of loading and unloading of the ship, container and underwater equipment for research management.
A crane for manipulation of the rosette. Photos in Fig. 25 present B/O MIGUEL OLIVER deck equipment.

Laboratories
Oceanographic vessels are outfitted with a series of laboratories, which will be staffed by the scientific staff embarked to carry out research campaigns. Normally, the laboratories are referred to as "dry" and "damp", but from the scientific point of view, they could be grouped together into only three: "Oceanography laboratory", "Biology and Fishery Research Laboratory", and "Underwater Acoustics Laboratory".
Oceanography Laboratory
Its main functions include analyzing and quantifying the information gathered on the practices affecting the previously mentioned missions, in areas of Geology and Physical Oceanography with the equipment mentioned.
Control of winches, fishing machines (with digital output of the operating parameters) and gantry crane will be centralized with remote information, if necessary, on the bridge of government and main laboratories. At the same time, centralization and access to the “NMEA-box” type data were gathered in the dry laboratory system.
Biological Laboratory
It will be designed for environmental measurement, copy collection and analysis process. In this area, we can conduct analyses of marine biotoxins, proteins, pathologies of marine species, quality of water control, discharges and waste control, etc.
These laboratories are often divided into sections:
Microbiology section. Composed of the following
elements:
• Biosafety cabinets
• Stoves and incubators
• Optical microscopes
• Account colonies
• Photometer
• Centrifuge
• Autoclave
• Personal computers
Biochemistry section. Composed of the following elements:
• Gas and liquid chromatograph
• Spectrophotometer
• Luminometer
• Thermocycler
• Personal computer
Many of the tools of analysis may be shared with the Oceanographic Laboratory. The most important are the following:
• Flow cytometry
• Spectrofluorimeter
• Fluorometer,
• Salinemeter,
• Titroprocesser,
• Liquid Scintillation counter.
Underwater Acoustics Laboratory
Equipped with systems to monitor and control the principal acoustic systems. It includes GPS repeater and repeater navigation plotters. The central systems of computer network and the telephone network of the boat connections are installed in this laboratory.
Normally located under fishing park, it includes:
• Specific equipment to conduct geology
campaigns to study the morphology, reflectivity, and classification of the nature of the seabed.
• Specific equipment for biology of fish and plankton species identification, estimation and distribution campaigns.
• Specific equipment related in Paragraph 3.
Conclusions
The possibility of determining the exact characteristics of the seabed, develop maps of fishing stocks of interest, or the opportunity to know the state of the marine resources are commitments that enable the respect and sustainable development of species, as well as cooperation among States.
Ocean vessels must be technological and innovation challenges for the national industry, not only in the naval construction industry, but also in the auxiliary industry; thus, allowing oceanography and fishing equipment to be of increasing national production.

Leading European fishing countries have begun to design high-performance vessels with lengths over 100 meters. France, Norway, Great Britain, Germany, and France are the five countries that, currently, set the course of oceanographic and fishery research and have fleets of ships with worldwide capacity action, even allowing to delve into polar zones.
The necessary renewal of the National Oceanographic Fleet must be targeted to advanced platforms, extremely quiet with greater energy efficiency, including the use of new fuels and scrupulous and advanced monitoring of environmental regulations. New construction designs based on Smallwaterplane area twin hull (SWATH) or Trimaran technology; introduction of new alternative energy sources and monitoring techniques; and remote diagnosis of onboard equipment should be the points to aim at.
The use of diesel electric propulsion (CRP) provides considerable savings to shipping companies due to the reduction of fuel consumption, lower maintenance costs, and increased flexibility during boat design. Another important advantage is that pollution is reduced. This factor will gain in importance as environmental legislation is getting stricter by the day.
The Integral Management of Vibration and Noise has been revealed as an effective tool that requires outsourcing and collaboration with different suppliers. "Acoustic dynamic design of the vessel commands".
Oceanographic vessels use winches and gantry cranes to enable more efficient deployment of scientific equipment. These infrastructures are important parts of the ship’s equipment and need constant innovation.
Integration of bridge equipment and communications with scientific systems should be encouraged to allow working on the ship from land laboratories in real time.
References
BELTRÁN, PUBLIO; PÉREZ, ÁLVARO Y GALINDO, Carlos: "Buque Oceanográfico Miguel Oliver. Se ha logrado la excelencia en ruidos y vibraciones a bordo de un buque". Revista Ingeniería Naval. Madrid. Mayo 2007.
CARRASCO, VICENTE: "Buque Oceanográfico Miguel Oliver. Un reto tecnológico de Simrad Spain". Revista Ingeniería Naval. Madrid. Mayo 2007.
DÍEZ, JOSÉ IGNACIO: "La renovación de flota del IEO. Retos tecnológicos". 47 Congreso de Ingeniería Naval. Palma de Mallorca. Octubre 2008.
HERNÁNDEZ, JERÓNIMO: "Emma Bardán, Buque Oceanográfico construido para la Secretaría General de Pesca Marítima". Revista Ingeniería Naval. Madrid. Febrero 2006.
HERNÁNDEZ, JERÓNIMO: "Los buques de investigación pesquera y oceanográficos de la Secretaría General de Pesca Marítima". 47 Congreso de Ingeniería Naval. Palma de Mallorca. Octubre 2008.
NÚÑEZ, JOSÉ FERNANDO; PÉREZ, LUIS: "El buque de cooperación pesquera, una iniciativa de la administración para la pesca responsable y sostenible". 47 Congreso de Ingeniería Naval. Palma de Mallorca. Octubre 2008.
SIMRAD SPAIN: "Sonar de Red FS70, Discriminación de especies mediante ecosonda científica EK60". Revista Técnica A Fondo. Madrid.
Annex 1: Modern spanish Oceanographic & Research Vessels
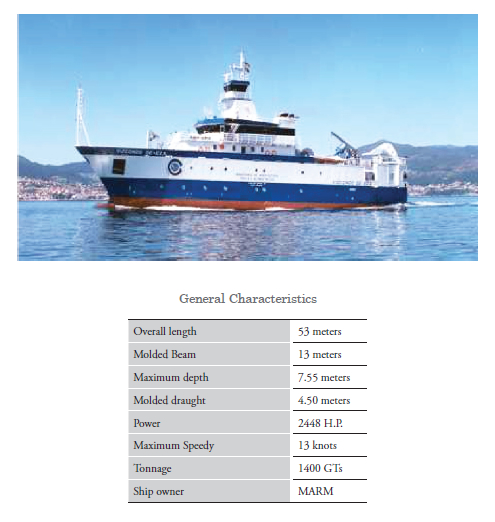
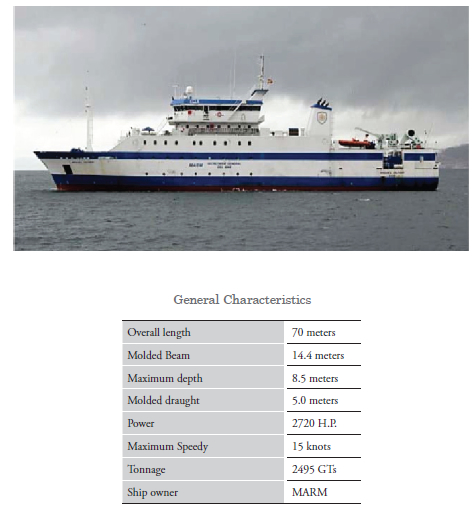
B/O VIZCONDE DE EZA
It is the first ship built in modern times by the General Secretariat of the Sea (MARM). From April 2001 to February 2010, the "Vizconde de Eza" participated in 75 research campaigns and offered cooperation in eight countries: Gabon, Guinea-Bissau, Angola, Algeria, Morocco, Namibia, Mozambique, and Mauritania.
This Oceanographic ship is considered a large floating laboratory with six specialized laboratories (chemistry, biology, physics, acoustics, moist, and computer) equipped with advanced scientific instrumentation. Its hull, reinforced on the bow, allows sailing through floating ice. It also performs uprisings of the seabed of up to 5,000 m in depth.
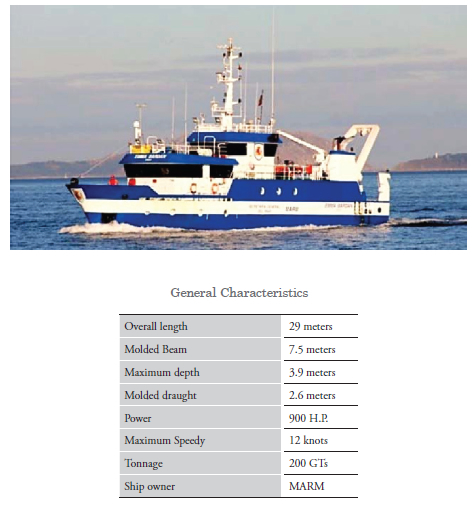
B/O EMMA BARDÁN
The EMMA BARDÁN Oceanographic and Fisheries Research Ship, built by the General Secretariat of the Sea, entered into service in January 2006.
The Ministry of Environment, Rural and Marine aims, with this vessel, to obtain accurate and reliable data to evaluate the state of Spanish fisheries and marine resources, as well as to prepare maps of the Spanish continental shelf fishing.
The ship has adequate resources for semi-pelagic and bottom fishing by means of a towing system through the stern ramp and incorporates appropriate equipment for the classification and investigation of the fish caught.
B/O MIGUEL OLIVER
It was officially presented in Vigo on 6 July 2007; the ship is named after Marine Biologist and Secretary General of Sea Fisheries, between 1982 and 1986, Miguel Oliver.
B/O MIGUEL OLIVER is one of the five internationally leading scientific ships. The vessel is qualified as an ecologic and quiet ship and it is the first Spanish ship to meet the ICES 209 rule on emission of noise and vibration onto the water.
It is a multidisciplinary ship with advanced technological equipment for navigation, oceanography, and fisheries research. It can be considered the Spanish fleet’s flagship in the search for fishing grounds.
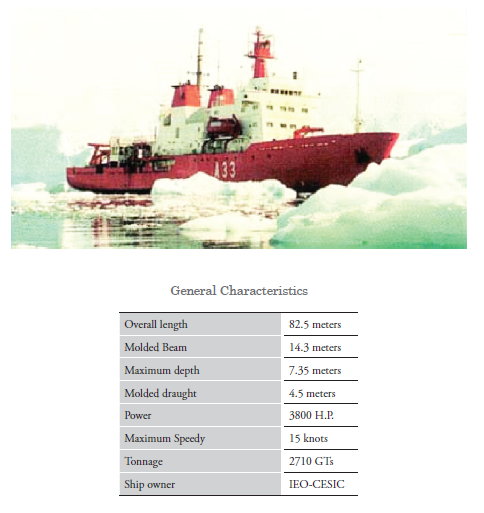
B/O HESPÉRIDES (A-33)
This oceanographic research ship was delivered to the Spanish Navy in 1991. The military crew on the ship is responsible for maintaining the platform and the navigation and support requirement for on-board research.
Although it organically depends on the Navy, the responsibility for the maintenance of the scientific equipment of the ship lies on the "Unidad de Tecnología Marina" (UTM) of the "Consejo Superior de Investigaciones Científicas" (CSIC) in Barcelona, which provides the technical support staff in the oceanographic campaign.
With its commissioning, the Spanish Scientific Community featured a first-level ship, equipped with comparable last generation technologies of the best international research vessels. The start of operations was a qualitative and quantitative leap in scientific production.
B/O SARMIENTO DE GAMBOA
The building of the ship "Sarmiento de Gamboa" was funded by the Ministry of Education and Science through the European Fund for Regional Development (FEDER), the Consejo Superior de Investigaciones Científicas (CSIC), and the Government of Galicia.
Although it organically depends on the Spanish Institute of Oceanography (IEO), the responsibility for the maintenance of the scientific equipment of the ship lies on the Unit of Marine Technology (UTM) of the (CSIC) in Barcelona, which provides the technical support staff in oceanography.
It is the most modern research vessel of the Spanish fleet. Launched in 2006, it entered into service in 2008, once all planned equipment were installed and tested.
The ship is intended for research in waters of the Atlantic Ocean. Focused on the study of global ocean circulation, marine biodiversity, fishery resources, and climate change, it has a wide variety of scientific and technical equipment for Oceanography, Biology and Marine Geochemistry, as well as complete laboratory and auxiliary equipment.