Research in offshore transfer cargo operations; challenges, developments, and new frontiers
Investigaciones en las operaciones de transferencia de carga offshore, desafíos, desarrollos y nuevas fronteras.
Max Suell Dutra1
Ivanovich Lache2
Katrin Ellermann3
Ricardo Ramírez Heredia4
Abstract
Currently, offshore operations are considered activities with high impact on the economy, which stands in direct relation to the products of great importance and value for diverse economic sectors. Thus, it becomes necessary to implement new technologies that make the manipulation of these products faster and easier. In this work, the authors introduce the problem in offshore cargo transfer operations. This problem involves different kinds of areas: logistics, dynamics, and control are some of them. The authors present an approach for the last two. In the dynamic problem is presented a study on the dynamics of a suspended load connected to a crane via a mechanism with two prismatic degrees of freedom. The studies show the complex large-amplitude motion of the load given the visibly nonlinear behavior of the ship. Therefore, the development of a fuzzy controller was necessary to decrease oscillations and position the load in one definitive point of interest. The work presents the test results, demonstrating that this type of manipulator in combination with an effective control strategy allows for the reduction of oscillations in offshore activities.
Key words: Offshore Operations, Nonlinear Control, Load Manipulator, Cargo load transfer.
Resumen
En la actualidad, las operaciones en alta mar se consideran actividades con alto impacto en la economía, lo cual se encuentra en relación directa con los productos de gran importancia y valor para diversos sectores económicos. Así entonces, se hace necesario implementar nuevas tecnologías que permitan más rápida y fácil manipulación de estos productos. En este trabajo, los autores presentan el problema en operaciones de transferencia de carga en alta mar. Este problema involucra diferentes tipos de áreas: logística, dinámica y control, son algunos de ellos. Los autores presentan un acercamiento para las últimas dos. En el problema de dinámica se presenta un estudio sobre la dinámica de una carga suspendida conectada a una grúa mediante un mecanismo con dos grados prismáticos de libertad. Los estudios demuestran el movimiento complejo de gran amplitud de la carga dada el comportamiento visiblemente no-lineal de la embarcación. Entonces, el desarrollo de un controlador de lógica difusa fue necesario para disminuir las oscilaciones y posicionar la carga en un punto de interés definitivo. El trabajo presenta los resultados de pruebas, demostrando que este tipo de manipulador en combinación con una estrategia efectiva de control permite la reducción de oscilaciones en actividades en alta mar.
Palabras claves: Operaciones offshore, Control no lineal, Manipulador de carga, Transferencia de carga.
Date Received: November 16th, 2010 - Fecha de recepción: 16 de Noviembre de 2010
Date Accepted: February 2nd, 2011 - Fecha de aceptación: 2 de Febrero de 2011
________________________
1Federal University of Rio de Janeiro (UFRJ) - Laboratory of Machine Design and Robotics. Rio de Janeiro, Brasil.
e-mail: max@mecanica.coppe.ufrj.br
2 Federal University of Rio de Janeiro (UFRJ) - Laboratory of Machine Design and Robotics. Rio de Janeiro, Brasil. e-mail: ilache@ufrj.br
3 Hamburg University of Technology (TUHH) - Department of Fluid Dynamics and Ship Theory. Hamburg, Germany. e-mail: ellermann@tu-harburg.de
4 Universidad Nacional de Colombia - Department of Mechanical Engineering . Bogotá, Colombia. e-mail: reramirezh@gmail.com
............................................................................................................................................................
Introduction
Container ships account for most of the intercontinental load transports. This is the reason for the interest in the development of innovative alternatives that help to load and off-load cargo to and from ships. Offshore load operations are part of this new way of working with cargo; for this reason, a diverse number of research projects and developments in innovative alternatives that support this kind of operation to work in a variety of situations are helping to establish a new way of performing load operations (Nottebom T, 2004; Diesel M, 2005).
All the works with offshore cargo transfer operations can be divided into three different types of areas. The first is a logistics problem; this problem involving all the procedures and norms of the process is basically "how to" and "where, when" concerns. The second is dynamic and studies specifically the dynamic problem between the two ships. Finally, the control problem is necessary to work efficiently in different kinds of sea levels, wind speeds, and operator experience. To summarize, Fig. 1 presents the principal areas involved in offshore transfer cargo operations.
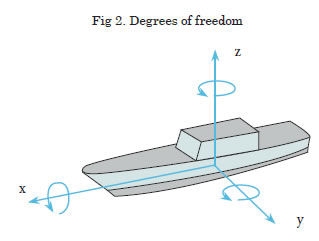
This paper presents a study on the dynamics of a suspended load that is coupled with a mechanism of two prismatic Degrees of Freedom (DoF). Because of the nonlinear behavior of the ship, it is possible to see complex load dynamics that, emphasizing the need to use a control mechanism that allows for the reduction of oscillations and positioning the load on a particular point of interest. In order to carry out this task, a fuzzy logic controller was implemented. The degrees of freedom of a ship are presented in Fig. 2.
Cargo Manipulationr
A Cartesian model for the cargo manipulator was developed, which is positioned on the ship. The first step is to determine the motion of the ship in all degrees of freedom. Generally, to identify or model the movement of the ship, six degrees of freedom are used (Fossen T, 1994; Sphaier HS 2005). For that reason, the final position of the ship is given by the combination of six movements (three rotations: roll, pitch and yaw; and three translations: surge, sway, and heave).
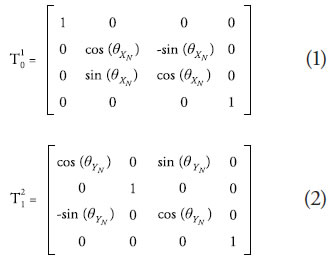
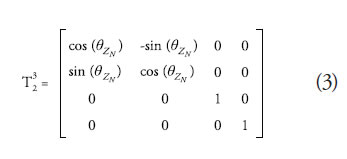
Having defined the movements of the ship, the kinematics is calculated for each degree of freedom in specific order. For this particular case, the first movements will be the rotations on each axis, then the displacements. Therefore, it is possible to see the matrix transformation for each axis. The rotation on the X axis in equation (1), rotation on the Y axis in equation (2), and finally, we have a matrix of transformation to the rotation on its axis called Z in equation (3).
The same procedure is performed for the displacements in the ship's axes, the displacement on axes X, Y, and Z is represented by matrices described in equation (4).
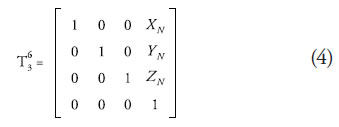
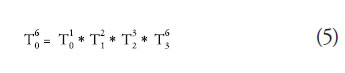
Finally, it is possible to find the actual position of the ship by multiplying the previous matrices, as shown in equation (5).
The result of the multiplication is a matrix transforming the fixed frame to the moving ship frame; this matrix is called ![]() and it is denoted as given in equation (6).
and it is denoted as given in equation (6).
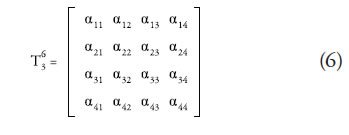
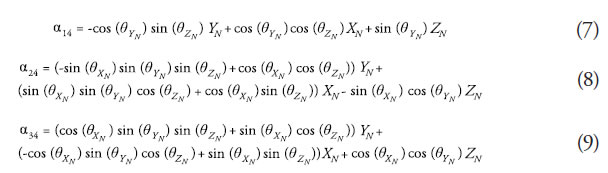
To describe the ship's final position, the elements needed are α14, α24 and α34. These components are given in equations (7), (8), and (9).
The elements represent:
X ship position = α14
Y ship position = α24
Z ship position = α34
Manipulator movements
At the time the cargo leaves the ship's surface, it can be considered a hung load, and if all the mass is concentrated on a single point, the system represents itself as a simple pendulum. To improve the dynamic model, the next element to define is the handler. It is defined as a Cartesian handler that moves the hung cargo (simple pendulum). The simplified system cargo manipulator can be seen in Fig. 3.

The position of the pendulum (cargo) in any moment of time relative to the vessel is determined by a set of transformation matrices that start from the ship, passing by the manipulator, and then to the load.
In this case, equation (10) represents the transformation matrix that takes the frame from the ship to the manipulator's frame by taking into account variables , Xm Ym, which are the axial displacement of the manipulator. Equation (11)

is the transformation matrix that changes the manipulator frame to the load frame where Lc is the length of the cable that links the cargo and the manipulator; and ![]() represent the angles of rotation on the X and Y manipulator's axes which can define the position of cargo at any time.
represent the angles of rotation on the X and Y manipulator's axes which can define the position of cargo at any time.
To define the position of the load with respect to the fixed frame, the transformation matrices of the transformations, ![]() are multiplied, generating equation (12), which represents the conversion of the fixed frame to the load.
are multiplied, generating equation (12), which represents the conversion of the fixed frame to the load.
The result of equation (12) is a 4X4 matrix, for a second time the most important elements of this matrix, which give the position of the load, are written on equation (13) for X, equation (14) for Y and equation (15) for Z.
Fuzzy Controller
The system presented in this article (shipmanipulator) is clearly a system with several nonlinearities, which implies a big task when it is necessary to choose a correct controller. This type of problem is studied in many papers (Jie L, 2005; Dongbin z, 2004; Yang K, 2006), where different types of nonlinear controllers are used to control cranes and cargo systems, especially those working on container ships.
One of the techniques, also implemented to control the crane, is fuzzy logic (Abbod M, 2000). It is a very intuitive way to put all the knowledge for the specialist in the controller behavior. The process of designing a fuzzy control system starts by taking the knowledge of the procedure for the transfer of cargo and the type of cargo and then following the basic steps:
1. Define Input and output variables.
2. Define fuzzy sets.
3. Define fuzzy inference system.
4. Define fuzzy controller rules.
5. Test to improve the controller.
For an efficient control using fuzzy logic, it is mandatory to adequately allocate the input variables, the range and the relevance of the rules that generates a correct output value, in this case the speed of the manipulator.
Input and output variables
In any project based on a fuzzy logic controller, it is required to determine the relevant variables for the problem that can be measured (inputs) and those that can be controlled. From the moment when the input and output variables are defined, it is important to also determine a reasonable range of values that can occur (due to the physical restrictions). For the problem presented, the set of variables are.
• Error between the set point and the actual position
• Ship velocity
• Manipulator velocity
This project uses two independent fuzzy controllers, one for the Y axis and other one for the Z axis; both have the same inputs, outputs, and rules.
Membership functions
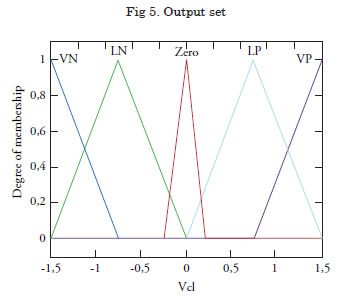
The fuzzy controller uses only triangular functions. For the function set, five triangular limited graduations of -1 to 1 were used. They are called Very Negative, Negative, Zero, Positive, Very Positive. For the pertinence function of the speed of the ship, represented by the Fig. 4, three functions of triangular limited relevance from -5 to 5 were used: Negative, Zero, Positive.
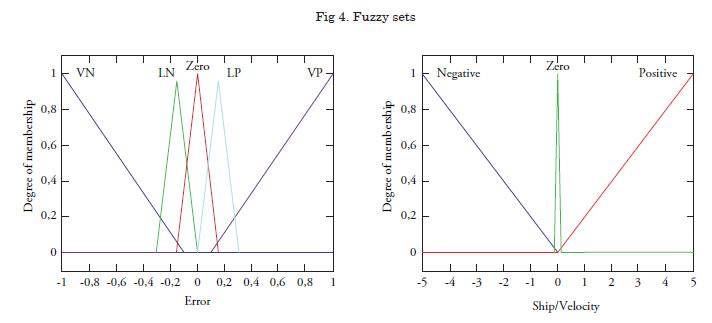
As in previous cases, Fig. 5 shows the output velocity of the triangular graduations for the manipulator, limited to -1.3 to 1.3 these values were selected based on the recommendations in the literature on the speed found in devices manipulating similar loads, which requires a maximum of 2 m/s. The sets used are called: Very Negative, Negative, Zero, Positive, Very Positive.
Rules
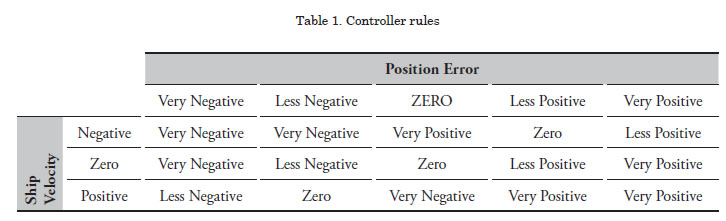
Setting the controller rules is one of the most important phases to correctly achieve the set point because any error can reproduce an undesired response. Table 1 show the rules used for the control of the proposed system.
At this point, it is important to mention that the set of rules presented in Table 1 is the result of an optimization design process; this process includes the technique called simulated annealing that shows its utility in diverse kinds of problems (Dutra M, 2008).
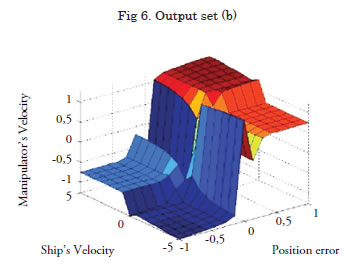
For a better view of the behavior of the rules, Figure 6 shows the value of the output called "speed of the actuator" for the different levels of contributions from both linguistic variables called "error of position" and the so-called "ship speed".
The general characteristics of the controller can be implemented, as given in Table 2.
Results
The controller developed in this project reduces the load oscillations in an offshore operation. To achieve that goal, the previously described manipulator was implemented to control cargo motion during offshore procedures.
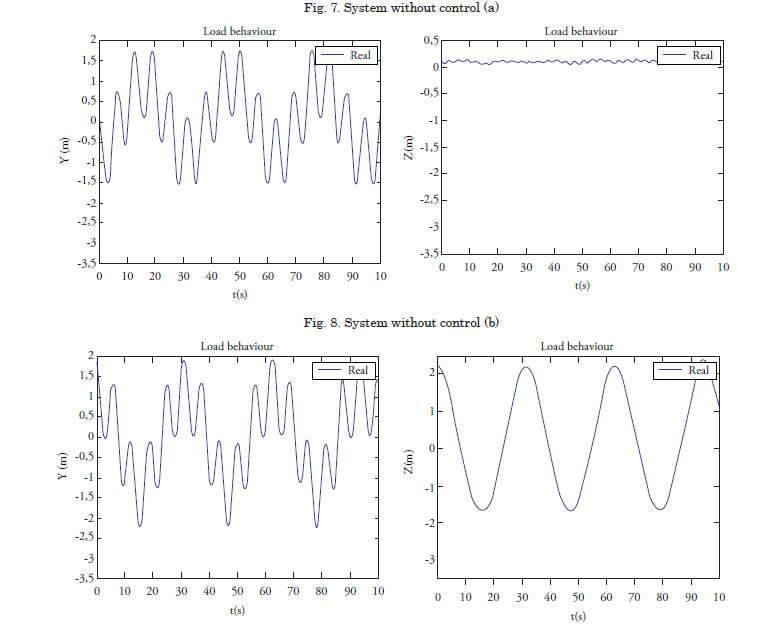
To see the complexity of handling cargo without a control system, see Figs. 7 and 8. They represent the different types of fluctuations of the components of this mechanism without action of the manipulator. The conditions of the simulation are shown in Table 3. The sea conditions on Table 3 are very important because those perturbations excite all degrees of freedom of the system; Fig. 7 represents the load movement in the direction of the Y and Z axes under roll excitation. Fig. 8 represents the same movements in Y and Z axes under excitation in all the degrees of freedom.
Conclusions
This paper shows the analysis of the dynamics during offshore loading transfer operations. Offshore operations have a large degree of complexity because of their nonlinear dynamics.
Because of that, it was mandatory to implement a nonlinear controller, based on fuzzy logic.
The fuzzy controller stabilizes the load at the desired point relatively quickly, as the results presented in Section 4 indicate. The effectiveness of the control generates good expectations for practical implementations, even knowing that some disturbances under real conditions have not been considered.
References
ABBOD, M. F., MAHFOUF, M., KEE, C. H., 2000, Fuzzy logic-based anti-sway control design for overhead cranes. Neural computing and applications.
DONGBIN, Z., DIANTONG, L., JIANQIANG, Y. 2004, Adaptive sliding mode fuzzy control for a two dimensional overhead crane. Mechatronics.
DUTRA, M. S., LACHE, I. S., PRIETO, L. D. 2008. New technique for inverse kinematics problem using Simulated Annealing. EngOpt 2008. Rio de Janeiro. Brazil.
FOSSEN, T. 1994. Guidance and Control of Ocean Vehicles. JohnWiley and Sons, New York.
GROOM, N., ROBINNET, D. 2002. Pendulation control system and method for rotary boom crane. Patent No US 6,442,439 B1.
JIE, L., GUANGFU, S., KLEEBERGER, M. 2005. Complete dynamic calculation of lattice mobile crane during hoisting motion. Mechanism and machine theory.
MAN BW DIESEL A/S. 2005. Propulsion trends in container vessels. Man BW diesel a/s industrial manual reference.
NOTTEBOM, T. 2004. Container shipping and ports: An overview. Review of Network Economics.
SPHAIER, S. H. 2005. Hydrodynamics. Federal University of Rio de Janeiro.
VERSCHOOF, J. 2002. Cranes - Design, Practice and Maintenance. Professional Engineering Publishing Limited. London and Bury St Edmunds UK.
YANG, K. S., YANG, J. H. 2006. Adaptive coupling control for overhead crane systems. Mechatronics.