
Designing for Damage Stability and Survivability – Contemporary Developments and Implementation
Dracos Vassalosa
Luis Guarínb
Abstract
With the new harmonised regulations for damage stability, SOLAS 2009, now in place (since January 2009), a number of ship owners and consequentially yards and classification societies are venturing to exploit the new degrees of freedom afforded by the probabilistic concept of ship subdivision. In this process, designers are finding it rather difficult to move away from the prescriptive mindset that has been deeply ingrained in their way of conceptualising, creating and completing a ship design. Total freedom it appears is hard to cope with and a helping hand is needed to guide them in crossing the line from prescriptive to goal-setting design. This will be facilitated considerably with improved understanding of what this concept entails and of its limitations and range of applicability. This paper represents an attempt in this direction, based on the collective knowledge and experience of the authors, deriving from many years of research on damage stability and survivability and a string of new concept designs for the passenger ship industry.
Key words: Probabilistic rules, damage stability and survivability, risk-based ship design
Resumen
Con la nueva normativa para estabilidad en avería SOLAS 2009, en vigor desde enero de 2009, algunos propietarios de buques y en consecuencia los astilleros y sociedades de clasificación se están aventurando a explotar los nuevos grados de libertad que ofrece el concepto probabilístico de compartimentación del buque. En este proceso, a los diseñadores les cuesta superar la forma tradicional de conceptualizar, crear y terminar el diseño de un buque. Aparentemente, enfrentar la libertad total es difícil y requieren ayuda para atreverse a cruzar la línea entre el diseño tradicional y el diseño por objetivos. Esa labor sería facilitada con una mejor comprensión de lo que implica este enfoque de diseño y cuáles son sus limitaciones y rango de aplicación. Este trabajo es un esfuerzo en este sentido, con base en el conocimiento y experiencia de los autores, obtenidos en muchos años de investigación sobre la estabilidad en avería y supervivencia, y una serie de nuevos diseños conceptuales para la industria de buques de pasajeros.
Palabras claves: Normas probabilísticas, estabilidad en avería, supervivencia, diseño de buques basado en riesgo
________________________
a The Ship Stability Research Centre (SSRC), Department of Naval Architecture and Marine
Engineering, Universities of Glasgow and Strathclyde, UK
b Safety at Sea Ltd, Glasgow, UK
e-mail: l.guarin@safety-at-sea.co.uk
............................................................................................................................................................
Introduction
From a ship stability viewpoint, the most fundamental goal to be achieved is for a ship to remain afloat and upright, especially so after an accident involving water ingress and flooding. Regulations to address the former are targeting subdivision and the latter damage stability. More recent instruments in the regulatory process tend to cater for both issues whilst contemporary developments have adopted a more holistic approach to safety that encompasses considerations of all principal hazards over the life-cycle of the vessel.
Notably, the first Merchant Shipping Act of 1854 is the first known legal requirement addressing safety at sea concerning watertight bulkheads, leading eventually and after heavy loss of life to the adoption of the first internationally agreed system of subdivision in SOLAS 1929.
The first damage stability requirements, on the other hand, were introduced following the 1948 SOLAS Convention and the first specific criterion on residual stability standards at the 1960 SOLAS Convention with the requirement for a minimum residual GM of 0.05m. This represented an attempt to introduce a margin to compensate for the upsetting environmental forces. "Additionally, in cases where the Administration considered the range of stability in the damaged condition to be doubtful, it could request further investigation to their satisfaction". Although this was a very vague statement, it is representative of the first attempts to legislate on the range of stability in the damaged condition. It is interesting to mention that a new regulation on "Watertight Integrity above the Margin Line" was also introduced reflecting the general desire to do all that was reasonably practical to ensure survival after severe collision damage by taking all necessary measures to limit the entry and spread of water above the bulkhead deck.
The first probabilistic damage stability rules for passenger vessels, deriving from the work of Kurt Wendel on “Subdivision of Ships”, [1] were introduced in the late sixties as an alternative to the deterministic requirements of SOLAS ‘60.
Subsequently and at about the same time as the 1974 SOLAS Convention was introduced, the International Maritime Organisation (IMO), published Resolution A.265 (VIII). The next major step in the development of stability standards came in 1992 with the introduction of SOLAS part B-1
(Chapter II-1), containing a probabilistic standard for cargo vessels, using the same principles embodied in the 1974 regulations. The same principle was used in launching at IMO the regulatory development of “Harmonisation of Damage Stability Provisions in SOLAS, based on the Probabilistic Concept of Survival” in the belief that this represented a more rational approach to addressing damage stability safety.
Evidence, however, of “common sense” driving rule making is very scarce; with accidents providing the main motivation for rule making, emphasis has primarily been placed on reducing consequences, i.e., on cure rather than prevention. Against this background, it is widely believed that the prevailing situation could be drastically improved through understanding of the underlying mechanisms leading to vessel loss and to identification of governing design and operation parameters to target risk reduction cost-effectively. This in turn necessitates the development of appropriate methods, tools and techniques capable of meaningfully addressing the physical phenomena involved.
Having said this, it was not until the early 90s when dynamic stability pertaining to ships in a damage condition, was addressed by simplified numerical models, such as the numerical model of damaged Ro-Ro vessel dynamic stability and survivability [2]. The subject of dynamic ship stability in waves with the hull breached received much attention following the tragic accident of Estonia, to the extent that lead to a step change in the way damage stability is being addressed, namely by assessing the performance of a vessel in a given environment and loading condition on the basis of first principles. In parallel, motivated by the compelling need to understand the impact of the then imminent introduction of probabilistic damage stability regulations on the design of cargo and passenger ships and the growing appreciation of deeply embedded problems in both the rules and the harmonisation process itself, an indepth evaluation and re-engineering of the whole probabilistic framework was launched through the EC-funded €4.5M, 3-year project HARDER [3]. The overriding goal of the HARDER project was to develop a rational procedure for probabilistic damage stability assessment, addressing from first principles all relevant aspects and underlying physical phenomena for all types of ships and damage scenarios. In this respect, HARDER became an IMO vehicle carrying a major load of the rule development process and fostering international collaboration at its best – a major factor contributing to the eventual success in achieving harmonisation and in proposing a workable framework for damage stability calculations in IMO SLF 47.
Deriving from developments at fundamental and applied levels in project HARDER as well as other EU projects such as NEREUS, ROROPROB and SAFEVSHIP and other international collaborative efforts (e.g., work at ITTC), a clearer understanding of damage stability started to emerge together with a confidence in the available knowledge and tools to address the subject effectively. All these efforts provided the inspiration and the foundation for SAFEDOR (2004 – Design / Operation / Regulation for Safety), a 20- million Euro EU FP6 Integrated Project of 4 years duration, which provided the opportunity for consolidating contemporary developments on damage survivability, thus rendering implementation possible even at design concept level. The knowledge gained can now be used to address critically all available regulatory instruments and to foster new and better methodologies to safeguard against known design deficiencies in the first instance, until safer designs evolve to reflect this knowledge, [4], [5], [6]. At this point in time, it is known for example that damaged ships in waves may capsize in one of the following modes (the first three after the final equilibrium condition is reached post-damage):
High freeboard ships: Provided there is some minimal positive righting lever and range of stability the ship will not capsize in moderate waves. Wave impacts on the side of the ship will induce some rolling in marginally stable cases, which could result in capsize at the larger sea states. Often ships are more vulnerable with the damage to leeward, since the GZ levers are typically less in the damaged direction and the induced dynamic roll is typically somewhat greater leeward.
Low freeboard Ro-Ro ships: This is the typical mechanism of capsize for Ro-Ro ships. The wave action gradually pumps water up onto the vehicle deck. The height of the water gradually increases until either a reasonably stable equilibrium level is reached where inflow is approximately equal to outflow for ships with sufficient reserve stability, or if stability is inadequate, the heeling moment of the water will cause a capsize to windward. In some rare cases Ro- Ro vessels may heel to leeward after the first few wave encounters with an insufficient freeboard on the weather side to prevent further water accumulation and the ship will continue to take water on the vehicle deck until a capsize results.
Low freeboard conventional ships: This is the typical mechanism of capsize for non-Ro-Ro ships. The highest waves will form boarding seas and will pile-up on the windward side of the deck, inducing roll and capsize, usually to windward. The weather deck tends to drain quickly if there is no capsize, and there is no build-up or accumulation of water as seem with enclosed Ro-Ro decks. One or two high waves in close succession are often sufficient to cause capsize.
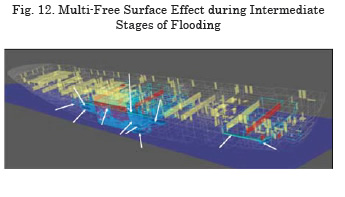
Multi-Free-Surface Effect: This mechanism of capsize is relevant to ships with complex watertight subdivision such as cruise ships. As the hull is breached, water rushes through various compartments at different levels, substantially reducing stability even when the floodwater amount is relatively small. As a result the ship can heel to large angles, even for small damage openings, letting water into the upper decks that spreads rapidly through these spaces and may lead to rapid capsize at any stage of the flooding.

The aforementioned mechanisms of vessel capsize help to judging how relevant or effective available regulatory instruments are, in being able to prevent or mitigate disasters, as indicated in the following for the instruments currently in use or due to be enforced:
Concerning the latter, a stage has now been reached where the draft text of the major revision to the subdivision and damage stability sections of SOLAS Chapter II-1 based on a probabilistic approach has been completed following final amendments in January 2005 to Regulation 7-1 involving calculation of the “p” factor. The revised regulations were adopted in May 2005 at the IMO MSC and entered into force for new vessels with keels laid on or after 1st January 2009. The new regulations represent a step change away from the current deterministic methods of assessing subdivision and damage stability. Old concepts such as floodable length, criterion numeral, margin line, 1 and 2 compartment standards and the B/5 line will be disappearing.
With this in mind there appears to be a gap in that, whilst development of the probabilistic regulations included extensive calculations on existing ships which had been designed to meet the current SOLAS regulations, little or no effort has been expended into designing new ships from scratch using the proposed regulations. This gap has been addressed to a large extent in [4]. This paper builds on that by examining this (now) statutory requirement alongside other contemporary developments.
Contemporary Developments
Contemporary regulatory developments are already a step ahead, necessitating concerted effort at global level to ensure safe transition from deterministic to goal-based safety. More specifically, in May 2000, the IMO Secretary- General called for a critical review of the safety of large passenger ships noting that "what merits due consideration is whether SOLAS requirements, several of which were drafted before some of these large ships were built, duly address all the safety aspects of their operation – in particular, in emergency situations”. This visionary prompt led IMO Maritime Safety Committee (MSC) to adopt a new “philosophy” and a working approach for developing safety standards for passenger ships. In this approach, illustrated in Fig. 1 (SLF 47/48), modern safety expectations are expressed as a set of specific safety goals and objectives, addressing design (prevention), operation (mitigation) and decision making in emergency situations with an overarching safety goal, commensurate with no loss of human life due to ship related accidents. The term “Safe Return to Port” has been widely adopted in discussing this framework, which addresses all the basic elements pre-requisite to quantifying the safety level (life-cycle risk) of a ship at sea.

More specifically the following elements are explicitly addressed:
1. Prevention/Protection: Emphasis must be placed on preventing the casualty from happening in the first place as well as on safeguards (in-built safety) to limit consequences.
2. Timeline Development: The focus is clearly on the timeline development of different events. For the first time in the history of rule-making, it is not only important to know whether a vessel will survive a given casualty in a given loading condition and operating environment but also the time the vessel will remain habitable, the time it takes for safe and orderly abandonment and for recovery of the people onboard.
3. Casualty Threshold: This advocates the fact that the ship should be designed for improved survivability so that, in the event of a casualty, persons can stay safely on board as the ship proceeds to port. In this respect and for design purposes (only), a casualty threshold needs to be defined whereby a ship suffering a casualty below
the defined threshold is expected to stay upright and afloat and be habitable for as long as necessary [5 days recommended] in order to return to port under its own power or wait for assistance.
4. Emergency Systems Availability / Evacuation and Rescue: Should a casualty threshold be exceeded the ship must remain stable and afloat for sufficiently long time to allow safe [3 hours recommended] and orderly evacuation (assembly, disembarkation and abandoning) of passengers and crew. Emergency systems availability to perform all requisite functions in any of the scenarios considered is, therefore, implicit in the framework. In addition, the ship should be crewed, equipped and have arrangements in place to ensure the health, safety, medical care and security of persons onboard in the area of operation, taking into account climatic conditions and the availability of SAR functions and until more specialised assistance is available.
Considering the above, it is worth emphasising that none of the questions arising (survival time?; functional availability post-casualty?; time needed for abandonment?) can be addressed in terms of rule compliance. Nonetheless, achievement of these goals in the proposed holistic, goal-based and proactive approach would ensure safety of human life commensurate with the safety expectations of today, by implicitly addressing all key elements of risk, for total risk (Safety Level) estimation and for direct use in Risk-Based Design, as explained in [8]. An evaluation framework, already being applied in the design of cruise/RoPax ships, is shown in Fig. 2 next.

The focuses in this paper is on the flooding survivability analysis though describing and discussing some early implementation results.
Early Implementation Results
In this section, some early results will be presented aiming to provide answers and clarity to concepts deriving from contemporary developments in damage survivability. To this end, a hypothetical cruise ship is used with the following particulars: (See Table 1). The subdivision layout is shown in Figure 3.


Flooding Survivability Analysis
Flooding survivability analysis normally entails the following, the first three of which are addressed here at various levels of detail.
Statutory Assessment
– Compliance with SOLAS 2009 (probabilistic rules)
– Optimisation of watertight subdivision
Transient-, cross- and progressive-flooding assessment
– Static vs. dynamic stability
– Time to flood
Time to Capsize
– Probabilistic approach for selection of damage (collision and grounding) cases
– Vulnerability approach for survivability assessment
Systems availability for each flooding scenario
– Geometrical and topological evaluation of main ship systems
Evacuability assessment
– Assembly and evacuation performance
– Assessment of time to capsize against total evacuation time
Evaluation of casualty threshold / return to port capability
– Probabilistic approach; link to system availability post-casualty
Statutory assessment
Acknowledging that emphasis on preventing a casualty from occurring in the first instance must take priority, focus on risk reduction by passive means (in-built safety) must come next and this must start at the beginning. To this end, the dilemma of prescriptive SOLAS-minded designers, illustrated in Fig. 3, in the simplest of levels, must be overcome. It is obvious that internal subdivision arrangement is a key issue affecting ship performance, functionality and safety, all of which have to date been catered for through the provision of rules and regulations that reflect, in essence, codification of best practice. Throwing this away and leaving on the table a blank sheet, makes ship subdivision a very difficult problem indeed. This was essentially the problem addressed in the EU project ROROPROB, [9].
Building on the understanding of Index A as outlined [4] – [6], affords a straightforward way of determining the relative (collision damage) risk profile of a vessel at an early design stage and hence devise an effective means of risk reduction by focusing primarily on the high risk scenarios.
The fully automated optimisation process typically produces several hundred design alternatives depending on the complexity of the ship’s layout and the number of variables. Typical variables of the optimisation problem include: type of subdivision, number, location and height of watertight bulkheads, deck heights, tank arrangement, casings, double hull, and position of staircases, lifts and escapes.
Using the Attained Subdivision Index, payload capacity, steel weight and other regulatory requirements as typical objectives/constraints, the optimisation problem outcome typically includes: reduced number of bulkheads, reduced deck heights, reduced void volume, reduced number of escape ways and required staircases, reduced steel weight, reduced complexity in tank arrangements, increased crew and service areas, improved functionality and, if required, improved Attained
Subdivision Index. In order to make the process effective, participation by all decisionmakers (designer, owner and yard) is essential to properly define the optimisation variables, objectives and constraints as early as possible in the design stage. Using this approach, known as platform optimisation, high survivability internal ship layouts can be developed, without deviating much from the current SOLAS practice, this making it easier for ship designers to relate to the proposed procedure. The actual process for platform optimisation as it is currently being applied to newbuildings design is illustrated in Fig. 4. In order to make the process effective, the participation of all decision-makers (the designer, the owner, the yard) is essential to properly define the optimisation variables, objectives and constraints. Using this approach, high survivability internal ship layouts have been developed, without deviating much from the current SOLAS practice, this making it easy for ship designers to relate to the proposed practice. A sample of the optimisation problem outcome is presented in Fig. 5.


Using Table 1 particulars and Fig. 6 (Version 1) as a basis, Version 5 (Fig. 7) is produced using the process utilised above with A=0.92.
Taking additional measures from the available array of current best SOLAS practice, it was possible to further increase the attained AIndex to 0.985, without sacrificing any of the vessel’s functionality. Time domain simulations with PROTEUS3, [10], have shown that such a vessel survives all probable
damages up to 4-compartment damage for all sea states up to 4 m Hs.

Flooding Vulnerability Assessment
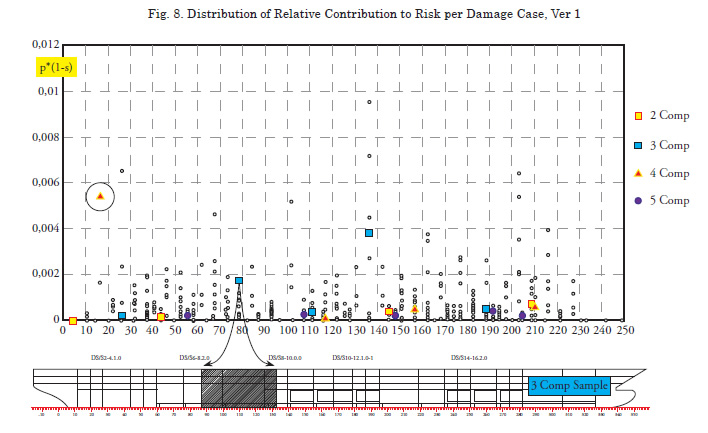
The risk profile of Version 1 ship is illustrated in Fig. 8 for all the statistically possible damage scenarios deriving from the probabilistic rules (Hs, loading condition, collision and grounding – the latter in addition to the current set of scenarios, which relate only to collision damage statistics).

These scenarios could be supplemented by using relevant experiential knowledge judiciously and through HAZID/brainstorming sessions with designer/yard/owner participating, aiming to identify any design vulnerability. Numerical simulations can then be used in calm water and in waves (as required) to establish the exact flooding mechanism and identify cost-effective changes for the local watertight arrangement using, for example, the PROTEUS3 software suite. The results are analysed in terms of occurrence of potentially dangerous behaviour or attitudes by addressing the following three modes of flooding explicitly, on a case by case basis and using a much more complex (in terms of number of compartments and number of openings) and a more complete model (up to 5 decks are being modelled – see Fig. 9):
(i) Initial (transient) Flooding
(ii) Cross-Flooding
(iii) Progressive Flooding

Transient and Intermediate Flooding
Having to deal with such a complex geometry, explicit dynamic flooding simulation of a damaged ship in waves is a must. Static analysis simply will not do. Moreover, in some cases where cross-flooding through intricate connection arrangements becomes a problem in terms of long cross-flooding times, results from simplified time-domain simulation codes need to be supported using CFD as the only viable option for a proper treatment of such a problem. The fact that industry appears to be pre-ordained to use static analysis when addressing damage survivability could at best affect adversely the design process and at worst severely undermine safety. Figs 10 and 11 (see fig.11 in page 67) demonstrate two such cases. In Fig. 10, the sfactor results in zero, because the angle of inclination exceeds the statutory range, which does not reflect what actually happens.
Conversely, Fig. 11 shows a damage case where the s-factor is non-zero based on the SOLAS 2009 formulation whilst numerical simulation results indicate progressive flooding, likely to result in capsize/sinking.
Multi-free Surface Effect
Fig. 12 demonstrates the result described in the introductory section.
Bulkhead Deck Submergence and Progressive
Flooding (Ducting, Piping, Doors, Windows,
Shafts, etc)
Scenarios of this nature demonstrate the need for explicit knowledge on how the flooding process evolves, as in many cases it proves to be rather straightforward to impede the evolution of flooding with easy and very costeffective measures. Figs 13 and 14 show the post-processing that modern tools afford in this quest.



Time to Capsize
The results of the foregoing investigation is analysed in terms of the distribution for the time it takes the vessel to capsize/sink, one of the key parameters in flooding risk estimation.
Accounting only for the damage case scenarios implicit in the new harmonised rules for damage stability (normally over 1,000) and considering the 3 loading conditions, also implicit in the rules, and some 10 sea states per damage case, it becomes readily obvious that brute-force time-domain simulations is not the “route to salvation”. In view of this, two lines of action are being followed: the first entails automation of the process using Monte Carlo simulation and performance-based assessment; the second relates to the development of a simpler (inference) model for estimating the time to capsize for any given collision damage scenario. For the example cruise vessel, results using the simpler model are displayed in Fig. 15.
A close examination of Fig. 15 reveals that a 15% increase in Index-A from version 1 to version 5 of the hypothetical cruise ship, results in a 60% reduction in the probability to capsize within 3 hours. Knowledge of the probability of survival beyond [3] hours in all relevant flooding scenarios would provide the basis for ascertaining safe return to port capability.

Moreover, an introspective look into the results of the example cruise ship, shown below in Fig. 16, reveals that with Index-A of 0.8 the risk contribution of 2-compartment damages is just over 2%, reducing to zero for Version 5 (A=0.92). In the latter, even for 3-compartment damages the risk contribution falls below 2%. Hence, with little judiciously expended effort, the damage survivability standard of passenger ships could be increased well beyond current levels without any adverse defect on ship functionality and earning

Concluding Remarks
Based on the work presented in the foregoing, the following concluding remarks may be drawn:
Acknowledgments
The support received over the years by the European Commission in undertaking part of the research work presented here is gratefully acknowledged. The authors would also like to express their appreciation and sincere thanks to the UK Maritime and Coastguard Agency for their continuing support in undertaking safetyrelated research.
References
[1]WENDEL, K, “Subdivision of Ships”, Diamond Jubilee International Meeting, New York, June 1968, pp 12-1 to 12-21.
[2]VASSALOS, D. AND TURAN, O., “Development of Survival Criteria for Ro-Ro Passenger Ships - A Theoretical Approach". Final Report on the S0T Ro-Ro Damage Stability Programme, University of Strathclyde, December 1992.
[3]“Harmonisation of Rules and Design Rationale – HARDER”, U Contact No. GDRB-CT-1998-00028, Final Technical Report, 31 July 2003
[4] VASSALOS, D, YORK, A, JASIONOWSKI, A, KANERVA, M AND SCOTT, A: “Design Implications of the New Harmonised Damage Stability Regulations”, STAB 2006, Rio de Janeiro, Brazil. September 2006.
[5] VASSALOS, D AND JASIONOWSKI, A: “SOLAS 2009 – Raising the Alarm”, 9th International Stability Workshop, Hamburg, Germany, August 2007.
[6] VASSALOS, D, JASIONOWSKI, A, YORK, A AND TSAKALAKIS, N: “SOLAS ’90, Stockholm Agreement, SOLAS 2009 – The False Theory of Oranges and Lemons”, 10th International Stability Workshop, Daejeon, Korea, March 2008.
[7] IMO Resolution 14, “Regional Agreements on Specific Stability Requirements for Ro-Ro Passenger Ships” – (Annex: Stability Requirements Pertaining to the Agreement), adopted on 29 November 1995.
[8] VASSALOS, D, JASIONOWSKI, A AND GUARIN, L: “Risk-Based Design: A Bridge too far?”, OC 2008 Seakeeping and Stability, Osaka, Japan, March 2008.
[9] ROROPROB – “Probabilistic Rules- Based Optimal Design for Ro-Ro Passenger Ships”, EU FP5 RTD Project G3RD-CT-2000-00030, 1999-2002.
[10] JASIONOWSKI, A. (2001): “An Integrated Approach to Damage Ship Survivability Assessment”, PhD Thesis, SSRC, University of Strathclyde, February 2001, Glasgow.