
Ship Science & Technology - Vol. 17 - n.° 34 - (27-33) January 2024 - Cartagena (Colombia)
DOI: https://doi.org/10.25043/19098642.247
Daniel Mauricio Cubides Garzón 1
Adriana Milena Castaño Padilla 2
Hernán David Vergara Pestaña 3
1 Gerencia de Diseño e Ingeniería de COTECMAR. Cartagena, Colombia. Email: dcubides@cotecmar.com
2 Gerencia de Diseño e Ingeniería de COTECMAR. Cartagena, Colombia. Email: amcastano@cotecmar.com
3 Gerencia de Diseño e Ingeniería de COTECMAR. Cartagena, Colombia. Email: hdvergara@cotecmar.com
Date Received: November 3rd, 2022 - Fecha de recepción: 3 de noviembre de 2022
Date Accepted: February 20th, 2023 - Fecha de aceptación: 20 de febrero de 2023
The fourth industrial revolution began a few years ago with the advancement and integration of artificial intelligence, digitalization, and automation in different economic sectors. The naval industry in different countries has also been at the forefront of this revolution, introducing robotics to achieve ships with levels of automation and surface vehicles with autonomous navigation, which can operate without crew on board. This is how the Colombian naval industry has also started this path towards maturity in the development and integration of 4.0 technologies in unmanned surface vehicles (USV), being pointed out in the naval development plan 2042 [1] of the Colombian Navy as an opportunity for technological advancement. COTECMAR, being a fundamental part in the support and projection of the Colombian Navy's capabilities, proposes a route for the design and construction of the first Colombian USV; for this reason, this article presents through a review, the efforts and progress made in the past and to date, as well as what is proposed for the future, the challenges and impact on the Colombian naval industry. This review will allow the generation of a strategic vision in the current members of the project and may also generate new interested parties that, through their knowledge, will generate valuable contributions that can promote a project that will guide the Colombian Navy towards the technological vanguard.
Key words: USV, Industry 4.0, Autonomous.
La cuarta revolución industrial comenzó hace unos años con el avance e integración de la inteligencia artificial, la digitalización y la automatización en diferentes sectores económicos. La industria naval en diferentes países también ha estado a la vanguardia de esta revolución, introduciendo la robótica para lograr barcos con niveles de automatización y vehículos de superficie con navegación autónoma, que pueden operar sin tripulación a bordo. Así es como la industria naval colombiana también ha iniciado este camino hacia la madurez en el desarrollo e integración de tecnologías 4.0 en vehículos de superficie no tripulados (USV), siendo señalado en el plan de desarrollo naval 2042 [1] de la Armada Colombiana como una oportunidad para el avance tecnológico. COTECMAR, siendo una parte fundamental en el apoyo y proyección de las capacidades de la Armada Colombiana, propone una ruta para el diseño y construcción del primer USV colombiano; por esta razón, este artículo presenta a través de una revisión, los esfuerzos y avances realizados en el pasado y hasta la fecha, así como lo que se propone para el futuro, los desafíos e impacto en la industria naval colombiana. Esta revisión permitirá la generación de una visión estratégica en los actuales miembros del proyecto y también puede generar nuevos interesados que, a través de sus conocimientos, generarán valiosas contribuciones que pueden promover un proyecto que guiará a la Armada Colombiana hacia la vanguardia tecnológica.
Palabras claves: USV, Industria 4.0, Autónomo.
This is how each of the stages in which there has been a peak in science and technological inventions has represented a revolution, from the invention of the steam engine to the technological revolution, three industrial revolutions are considered. Today with the rise of artificial intelligence, digitization and automation, a fourth industrial revolution or Industry 4.0 is mentioned. which is mainly based on the ability to integrate systems, which combines physical infrastructure with software, sensors, digital and communications technology [2].
These advances that identify Industry 4.0 have also had an impact on the maritime, riverine and naval sector, being applied in the development of autonomous manned and unmanned vessels, in which communication systems, cybersecurity, digital and industrial identity, artificial intelligence, virtual reality, distributed data base, among others, are integrated.
The development of USV has been welcomed mainly by the naval sector, with the aim of using this type of technology to support naval vessels in missions that may pose a threat to the crew, such as mine sweeping, armed escort, anti-piracy, surface warfare, among others, and thus reduce risks to life.
Likewise, this article brings together the efforts that have been made in Colombia around the USV subject, in which COTECMAR as a support shipyard of the Colombian Navy seeks to strengthen its capabilities to integrate and develop existing technologies in the framework of Industry 4.0 that allow progress in the development of ships with autonomous levels and [3] unmanned surface vehicles.
The Colombian Navy, in the Force Planning document to 2042, states the need to build multimission frigate type ships in the Strategic Surface Platform Program (PES) [1], which will have means to support the defined missions in which USVs are contemplated. Thus, COTECMAR, in line with its strategic direction, has allocated resources to address the issue of autonomous and unmanned vehicles [3]. The efforts made are shown below.
In 2000, during the process of updating, modernizing, repowering and extending the useful life of the FS-1500 frigates under the "Orion" plan, the Navy received an offset benefit from the Innova organization [4].
As a result of this benefit, it was agreed to execute the USV SÁBALO project, which would be focused on the development of missions in river environments. The missions were focused on: SOF (Special Operations Forces), surveillance, reconnaissance, patrolling and river control. For the development of these missions, the vehicle would have ISR (Intelligence, Surveillance and Reconnaissance) capabilities, through equipment such as: An IMU (Inertial Measurement Unit), GPS, Electronic Compass, AIS, EO/IR cameras and underwater sonar [5].
Despite the previous capabilities, the USV SÁBALO did not have the possibility of being improved or used, the system is considered as a “black box” [6], and the Colombian Navy could not use it in operational environments with the capabilities with which it was designed for, instead it was used for research and development of research project within the Escuela Naval de Cadetes Almirante Padilla.
In 2019 COTECMAR began with the development of a state of the art that would allow identifying the status and progress of unmanned surface vehicle technology. This study was consolidated through the publication of a chapter in a book called "Unmanned surface vehicles: technology advancement and its application in the Colombian Navy" [7].
The study allowed developing different points about USVs, the first one was a definition of unmanned surface vehicles according to different concepts, thus generating a definition on which the study would be carried out. This definition states the capability of the vehicles to perform tasks on the water surface, which will depend on their design, equipment, and configuration. Additionally, it is mentioned that it is usually thought that they have the capacity to operate without human presence in the vehicle, which may not be the case for those that have dual use, multiple use or simply human personnel in the vehicle performing some kind of tests or evaluation.
The state of the art also made it possible to generate an overview of aspects such as:
All current regulations on operation, assumption of responsibilities of shipowners, insurance, classification societies and the environment are regulated in the navigation and operation of vessels with crew on board, which is why it has become necessary to mention the legal scope for autonomous and unmanned vessels, as well as the responsibilities involved in the navigation of these, in case of maritime accidents, collisions, spills, sinkings, the responsibilities of the shipowner must be determined, defining the limit of operations and navigation.
Thus, in 2020, COTECMAR, together with other companies in the naval sector, such as Marine Colombiane, Navantia, Naval Group and CMN, participated in the review and contribution of comments to Bureu Veritas, a company that would be generating regulations and standards associated, among others, with autonomous and unmanned vehicles.
Through COTECMAR's participation, different chapters of the SOLAS convention and the MASS UK code of practice and principles of conduct for autonomous maritime vessels were analyzed and commented on, so that Bureau Veritas will integrate expert knowledge on the requirements of the regulations that are maturing. The documents or chapters reviewed by COTECMAR are as follows:
In the framework of the 2020 Minciencias call through Fondo Caldas, COTECMAR participated in the formulation and development of the project "Technology Demonstrator (TRL5) on the Unmanned Surface Vehicle for the frigate “Plataforma Estratégica de Superficie” (PES), focused on the communications system and its integration with the navigation control developed by ENAP for its future implementation in the USV of the PES". In this project COTECMAR participated in the integration of the USV control station, which delivers data to the Link-CO system, for the visualization of the USV telemetry in the tactical network through Link-CO's HMI.
COTECMAR as a science and technology corporation as well as a technological development center, has the capacity to develop innovative products for the Colombian Navy and external suppliers in Latin America. Therefore, the corporation has identified the opportunity to strengthen industrial and technological capabilities through the development of autonomous and unmanned vessels, which in the same way integrate the necessary equipment to develop the missions that the Colombian Navy defines in its functional requirements.
According to the Colombian Navy's Naval Development Plan (NDP) 2042, unmanned surface vehicles with military capabilities and scientific research present an opportunity for technological development and are part of the fourth industrial revolution, focused on the naval and maritime area [1].
The development of a USV must take into account its main components such as the following:
Taking into account what is mentioned in the NDP 2042 and the components of a USV, it is established that in order to achieve technological scaling, different routes for the development and production of autonomous and unmanned vehicle technology in COTECMAR are derived.
This initiative started from the Design and Engineering Management GEDIN, where goals are proposed to achieve this technological maturity. These initiatives began with the relationship with different expert companies in the design and construction of these vehicles, through the socialization of technical and commercial information, while it is presented as an opportunity to strengthen relations with a technological partner (strategic alliance), with which in the future they can serve potential customers of USV.
In the same sense, as an additional route to reach technological maturity, it is proposed to have a platform for the case study or a USV prototype that allows testing remote control of the vessel, as well as autonomous navigation. Both would be considered as the first achievements, prior to integration between equipment and sensors associated to the mission and the necessary components.
The design and construction of a prototype of an Unmanned Surface Vehicle is considered to have a technological maturity of TRL7 level, with the objective of testing in a real operating environment the basic missions of assisted and remotely controlled navigation.
USVs can perform different types of missions in the security and defense fields, according to the U.S. Department of the Navy, there are seven main missions [9]:
According to the different missions described above, a mission associated with maritime and port security was selected for the USV prototype. This decision was made according to the availability of existing technology that can be included in the prototype for the proposed purposes, according to the scope of the project for this stage or maturity level initially outlined.
The main objectives of the mission will be:
This is how the vehicle will be proposed to fulfill the mission of control and surveillance of coastal and port areas of the Bay of Cartagena and will operate in an area of approximately 4 nmi.
To test the prototype in the real operating environment, it is proposed to execute the basic mission described above and framed in the navigation area. Within this delimited area it will be possible to make the necessary communication links between the ground station and the vessel, a communication link will be established for the control and monitoring of the propulsion system, control, power supply and platform systems and another communication link for video transmission.
The USV prototype will have the capability to be operated by remote control, without onboard operating personnel. The prototype will also have the payload and software required to allow remote control of the platform and video supervision from the ground operation center.
For the base platform of the USV prototype, the hull of the BRF shallow draft boat will be used for the integration of the systems, which is a hull of a vessel with military mission designed and tested by Cotecmar, with general characteristics that can be adjusted to the stability and maneuverability requirements of a USV, see Fig. 1.
Fig. 1. Rendering of the USV prototype concept, based on the BRF hull.
The general characteristics of the platform established for the prototype are shown below:
The hardware and software for remote control of the vehicle will be based on the specifications of the electric outboard motor to be purchased.
Likewise, according to the USV's mission, sensors and basic equipment will be integrated for the satisfactory fulfillment of this mission (Cameras, navigation lights, antennas, radar, satellite compass, among others), which will allow the visualization of the environment and general situational awareness for decision making from the ground station.
The communications to be specified and installed on board the prototype will consider the amount of information and data to be transmitted between the vehicle and the ground control station, as well as the coverage area in which to test its performance and operation.
In the first scope for the USV prototype, efforts have been directed towards the preparation of the platform with its systems and the necessary equipment for the remote control operation mode as the first level of automation, stages 1 and 2 of the proposed route for the in-house development and maturity of the technology in Cotecmar, see Fig. 2.
Fig. 2. Proposed roadmap for the development and maturity of autonomous and unmanned vehicle technology.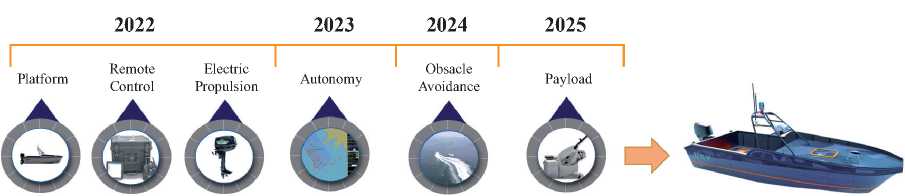
Considering the stages shown in Fig. 2., it is contemplated that the construction of the remotely controlled USV represents a value gained for the continuity of the stages to be developed in the future, which will strengthen the technical capacity of human resources in Cotecmar for the appropriation of new knowledge, application and materialization of innovative and scalable products in the maturity of Industry 4.0 in the fluvial, maritime and naval sector, as well as progress in the scale of commercial maturity.
The following are the stages that are expected to be executed sequentially in order to give continuity to the development, as follows:
[1] «Armada República de Colombia, «Plan de Planeamiento de Desarrollo Naval 2042 , primera edición,» Bogotá - Colombia., 2020.
[2] K. SCHWAB, «La Cuarta Revolución Industrial (P.Gayozzo y F. López de Pomar Trad.),» Futuro hoy, vol. 1, n° 1, pp. 6-10, 2020.
[3] COTECMAR, «Direccionamiento Estratégico de Cotecmar 2019-2034,» Cartagena -Colombia, 2019.
[4] H. A. BUCHEIM DUARTE, «Obtención del modelo de velocidad para el vehículo de superficie no tripulado "Sabalo" y su futura actualización en el desarrollo del sistema de control de navegación de la embarcación.,» Escuela Naval de Cadetes Almirante Padilla, Facultad de Ingeniería Naval., Cartagena de Indias. Colombia, 2018.
[5] GRUPO INNOVA, «USV SÁBALO, Entregable E 2.3.1 Documento de especificaciones.,» España, 2013.
[6] L. AMADOR REYES Y N. CORREA RAMOS, «Implementación del sistema de control de camara PTZ por radiofrecuencia en Vehiculos de Superficie no Tripulados "SABALO",» Escuela Naval de Cadetes Almirante Padilla, Facultad de Ingeniería Naval. , Cartagena de Indias. Colombia. , 2017.
[7] D. M. CUBIDES GARZON Y M. A. ARIZA ZULUAGA, «Vehículos de superficie no tripulados: avance de la tecnología y su aplicación en la Armada de la República de Colombia,» de Tecnologías de la cuarta revolución industrial y su aplicación en la Armada Nacional de Colombia, Bogota D.C. Colombia, Universidad del Rosario., 2022, pp. 195-234.
[8] K. BLOMBERG Y J. GROSS, Conceptual Study of a USV for the Swedish Navy, Swedish Defense Material Administration (FMV), 2014.
[9] Deparment of the Navy, The Navy unmanned surface vehicle (USV) Master Plan, Estados Unidos, 2007.