
Analysis of Operational and Seakeeping aspects in the Design of PS V type for the Colombian Caribbean Sea
Análisis de los aspectos operaciónales y de comportamiento en olas en el diseño de embarcaciones de apoyo tipo PSV para el Caribe Colombiano
Jairo H. Cabrera 1,Cinthya Marcela Medina2
1 Universidad Tecnológica de Bolívar, Faculty of Engineering. Cartagena de Indias, Colombia, e-mail: jcabrera@unitecnologica.edu.co
2 Universidad Tecnológica de Bolívar, Faculty of Engineering. Cartagena de Indias, Colombia, e-mail: cinthyamedina24@gmail.com
Date Received: February 4th 2016 - Fecha de recepción: Febrero 4 de 2016
Date Accepted: May 17th 2016 - Fecha de aceptación: Mayo 17 de 2016
Abstract
Colombia is currently searching for oil and gas at sea as new exploratory frontiers so as to incorporate new reserves. With the beginning of maritime operations comes the need for large offshore structures that allow the extraction and separation of oil and gas before transporting it to land. Most of these platforms require specific support and supply vessels, carrying a variety of loads, from liquid and bulk up general cargo, and various specific activities such as towing, rescue staff in case of accidents, firefighting and positioning anchor handling. In the offshore industry, these are known as PSV (Platform Supply Vessels). The main purpose of this work is the hydrodynamic PSV considering the environmental and operational conditions of the Colombian Caribbean including a case study.
Key words: Offshore Operations, Seeakeeping, PSV.
Resumen
Actualmente Colombia está buscando petróleo y gas en el mar así como nuevas fronteras exploratorias para incorporar nuevas reservas. Con el inicio de las operaciones marítimas se presenta la necesidad de grandes estructuras costa afuera que permitan la extracción y separación de petróleo y gas antes de transportarse a tierra. La mayoría de estas plataformas requieren buques de apoyo y aprovisionamiento específicos, llevando una variedad de cargas, desde líquidos hasta grandes cargas generales, y varias actividades específicas tales como remolcar, rescatar trabajadores en caso de accidentes, maniobras contraincendios y de posicionamiento de anclas. En la industria costa afuera, se conocen como buques de apoyo a plataforma (PSV: Platform Supply Vessel). El objetivo principal de este trabajo es considerar la hidrodinámica del buque considerando las condiciones ambientales y operacionales del caribe colombiano.
Palabras claves: operaciones costa afuera, comportamiento en el mar, buques de apoyo a plataforma.
Introduction
Colombia is becoming a leader in crude oil production in South America, growing at above 10% rates, more than Brazil. Colombia currently holds the third place in the region, climbing up the ranks from the fifth place since 2005, to its current position [10].
The hydrocarbon sector has been the spearhead of the country’s Government strategy, shifting from US$ 277 million in foreign investment in 2003, to US$ 263 million in 2009. This sector is undertaking an aggressive plan to explore and produce, focusing on increasing the largest index of utilization of the current reservoirs, increasing the transportation infrastructure to accelerate the production in the new findings, and increasing its presence in the Caribbean with recent offshore exploration contracts [10].
Facts and numbers show that the oil activity has its engines running and that Colombia is increasingly attractive for foreign investment in the Latin American area. The spike in drillings is largely due to the leadership assumed by the oil sector. Colombia produces a little less than one million daily barrels, but it has a potential of 47 billion barrels in its reserves. It is noteworthy that the depths of the Caribbean are focusing the attention of companies such as Ecopetrol, Exxon Mobil and Petrobras [9].
Colombian Caribbean Sea is one of the main targets of the companies in the oil sector, and therefore various studies must be made regarding the support services that these new offshore infrastructure will demand.
With the beginning of maritime operations comes the need for large offshore structures that allow the extraction and separation of oil and gas before transporting it to land. Most of these platforms require specific support and supply vessels, carrying a variety of loads, from liquid and bulk up general cargo, and various specific activities such as towing, rescue staff in case of accidents, firefighting and positioning anchor handling [17].
The design of this type of vessels must consider the special characteristics of the maritime conditions of the operating regions or exploration blocks through a spectral analysis. The main purpose of this work is to analyze the behavior at sea of support vessels that adapt to the particular wave conditions of a specific location from the Caribbean Colombian Sea.
Analysis models
Ocean-Wave Spectra
The models for analyzing the behavior of vessels at sea is initially based on the vessel behavior represented by its RAO's and the Ocean-wave spectral crossing considering random seas, representing by the probabilistic model from equation 1.
The zero order spectral moment m0, equation 2, is of vital relevance and it is equivalent to the area under the curve of the wave spectrum, which accounts for the variance of the time series of the evaluated waves.

The standard deviation and up-zero Crossing are given by equation 3 y 4 as below.


Mean Period, can be found to calculate the center of the area of the energy spectrum, and it is given by equation 5.

Significant wave height HS, equation 5, represents the mean of the upper third of the highest ocean heights.

There are different analytic models to analyze the ocean-wave spectra. The next step is the correct selection of wave spectrum for a particular seaway. Reviews of the main models are show below.
It is used when the height and period information are available.
This criteria is used in places where the wave formation region is a constraining factor for wave generation, it is a variation of the Bretschneider spectrum [1].
Seakeeping Analysis
Seakeeping ability measure of how well suit a vessel is to condition when underway. It also refers to the analyzing the behavior of a vessel in regular waves, representing through the RAOs (Response Amplitude Operator). RAO is a linear operator that represents the input (wave) — output (movement) transfer, it being of key relevance to determine vessel design parameters.
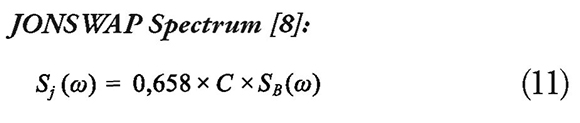
The RAO describes how the response of the vessel changes with frequency variations. The Fig. 1 (page 50) shows a classic example of a RAO response representing the Heave and Pitch amplitudes from PSV Case study.
We can see how RAO approaches one for low frequencies and it is when the vessel shifts up and down with the wave, acting as a cork. For high frequencies, the response approaches zero while the effect of many short waves in cancelled along the vessels length. Normally, the vessel would also have a peak higher than one, which occurs close to the natural period of vessels. The peak is due to resonance. A RAO above one indicates that the vessels response is higher than the amplitude of the wave (or than the slope).
Spectral Crossing>/
It is the product of the Sea spectrum times the transference function (RAO), Response Amplitude Operator, according equation 12, below.

Seakeeping Criteria
In order to analyze the seakeeping behavior of PSV, we must consider the following criteria, known in literature as events:
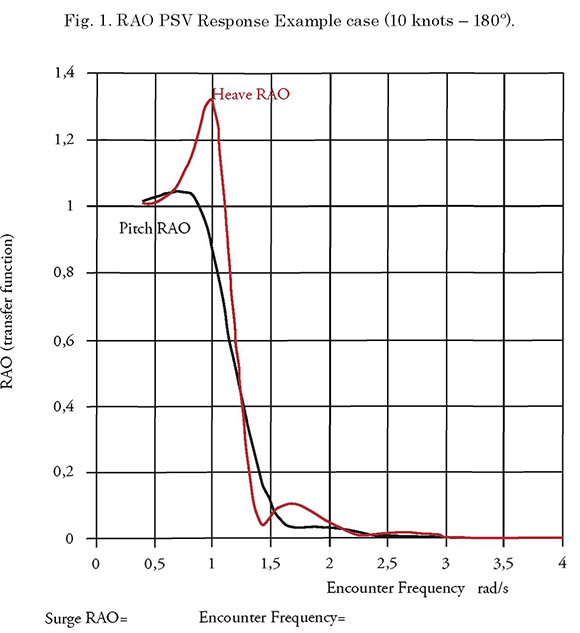
In accordance with these analysis, we chose six diff erent points along the hull of the vessel deemed as critical and where the events were to be analyzed.
The locations are:
P1 – Bow (Forecastle)
P2 – Bow (Forefoot)
P3 - Propeller
P4 - Stern
P5 – Upper deck
P6 - Superstructure
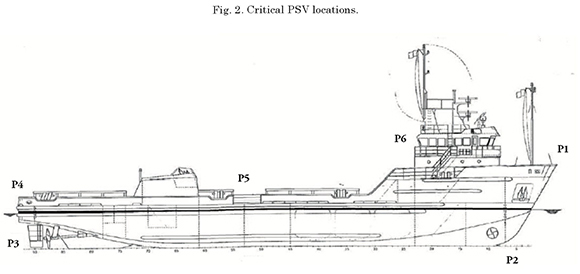
Fig. 2 shows the identification of these critical points on the hull of a PSV type vessel.
Motion Analysis program based on “Strip Theory” was used to analyze the various events on the behavior of the vessel at sea, where each transverse section of the ship resembles a polynomial in relation to the cylindrical shape of the hull. This theory applies to slim vessels and it is assumed that the presence of the hull does not affect the incidence of the wave on the hull.
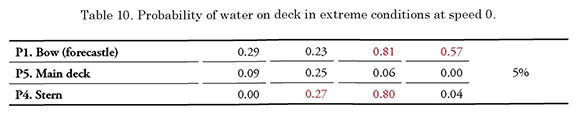
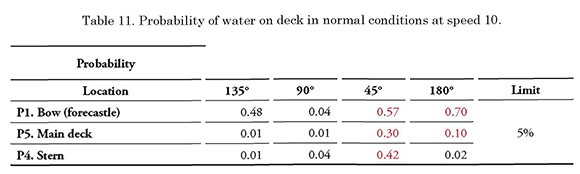
Water on deck
Water on deck occurs when the movement of the vessel due to the water level exceeds the hull depth that exerts a load on the deck due to a mass of water exceeding the depth. Fig. 3 show a example for this phenomenon.
For the case of the design of an offshore support vessel, this analysis becomes even more important due to the movement of the load and the crew on the deck.
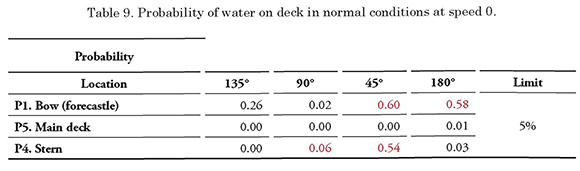
The predefined limit for water occurrence on the deck is 5%. However, in the case of support vessels, water deck is a common event. In this case, the vessel shall be designed for the least occurrence and to ensure the safety of the crew that performs tasks on exposed decks. The probability of this event occurring is representing by equation 13.

Where:
h as the effective freeboard height
m0 as the variation of the vertical relative
displacement spectrum.
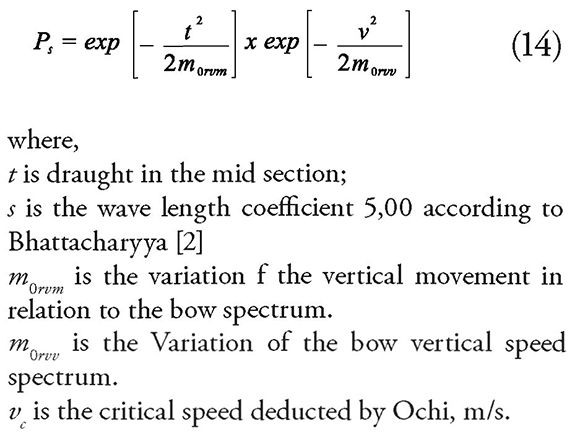
Hydrodynamic impact
The hydrodynamic impact, known as slamming, occurs when the combination of displacement and vertical speed is strong enough so that the combined pitch and heave response is amplified, causing an impact when the bow enters the water as show 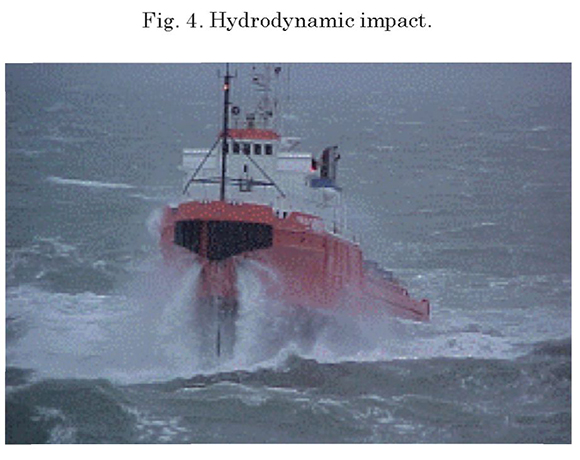
The information obtained regarding this event is:
Equation 14 representing the probability of this event occurring and must not exceed 1%.
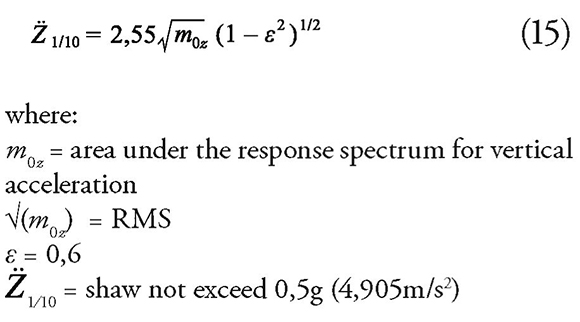
Accelerations on the Main Deck and Quarters
Accelerations must be verified in these locations to prevent exceeding an acceleration that may affect the wellbeing of the crew.
There are some ocean conditions in which the crew may become exposed to uncomfortable situations that have an impact on the performance of their duties.
The intensity of accelerations for different locations of interest is determined by the equation 15, below.
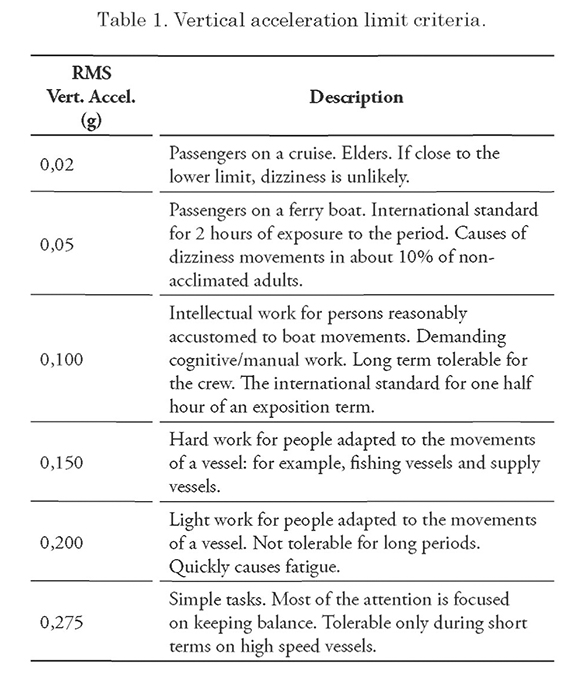
For the case of passenger vessels, assessing comfort in sailing is of vital importance, and it may be expressed as the percentage of passengers becoming seasick in agitated waters. Lateral and vertical acceleration are the main causes of dizziness. [6], [7], [12].
Table 1 shows a vertical RMS acceleration scale that may be used to estimate the maximum acceptable magnitude for different on-board activities and for the crew and passenger comfort.
Table 2 lists typical criteria for the performance of a battleship crew. These criteria are presented as having significant amplitude, which is the mean of a third of the highest amplitudes and is close to what a trained observer could estimate.
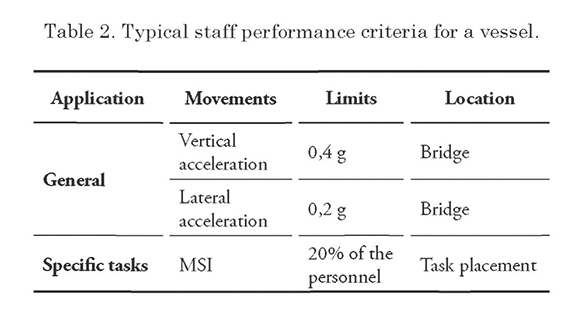
The Motion Sickness Indicator (MSI) concept was developed in a study sponsored by the United States Navy in the 1970s, to investigate the effects on humans of vessel motion (O'Hanlon and McCauley, 1974) [13]. The research sough to qualify the incidence of motion sickness in a group of over 500 people exposed to different amplitudes and frequencies of vertical movement. The RMS acceleration and the frequency ranged between 0.27 to 5.5 m/s2 and 0.083 to 0.700 Hz, respectively.
The experiments showed that motion sickness onset correlated to the acceleration and frequency, thus yielding a motion sickness indicator from said data. The MSI value indicates the percentage of persons who experienced motion sickness in a 2h testing period. According to the test data, people have significantly less tolerance to vertical movement between 0.2 and 0.16 Hz (5-6 s), range from higher to lower frequencies.
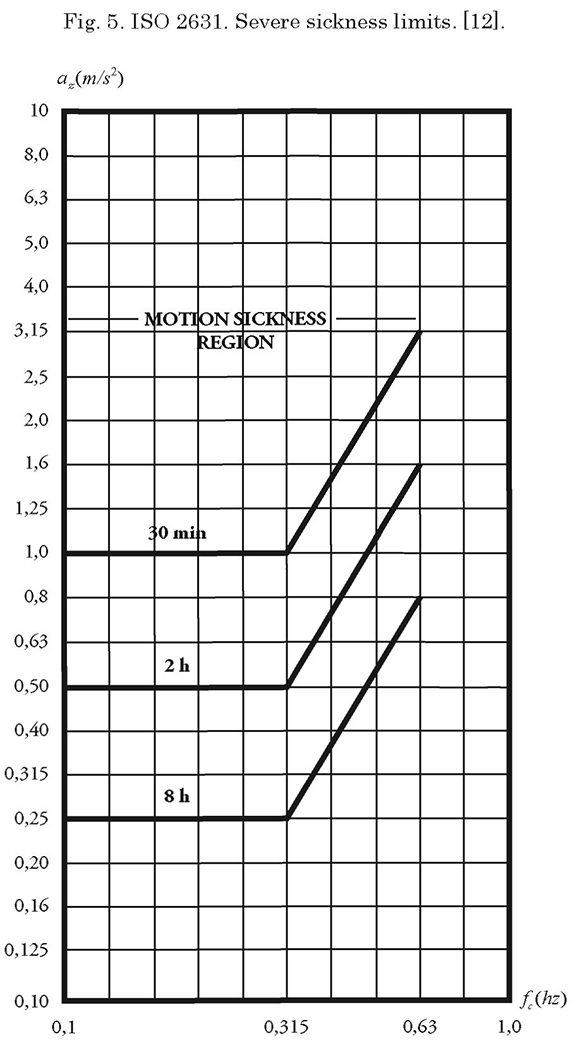
The main source of criteria on the incidence of motion sickness is International Standard ISO 2631 (ISO 2631-3,1985) [12]. This standard covers vertical vibration from 0.1 to 0.63 Hz frequency range and links the vertical acceleration, and frequency factors, and offers limits severe discomfort in terms of the RMS vertical acceleration for different exposure times, as shown in Fig. 6.
The data field indicates that around 10% of the passengers will show motion sickness symptoms when RMS acceleration is 0.5 m/s2 (approximately 0.05 g significant), which is also the ISO limit for a period of a two hour exposure in the 0.1 to 0.315 Hz range.
As Fig. 5 shows, depending on exposure time and oscillation frequency, several RMS vertical acceleration values could be selected as criteria for behavior at sea. This would yield different levels of habitability for the same water conditions.
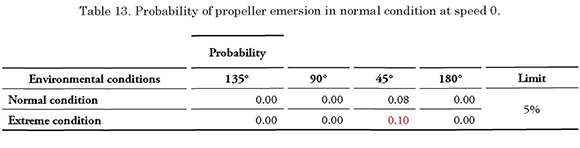
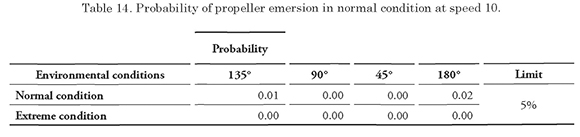
Propeller emersion
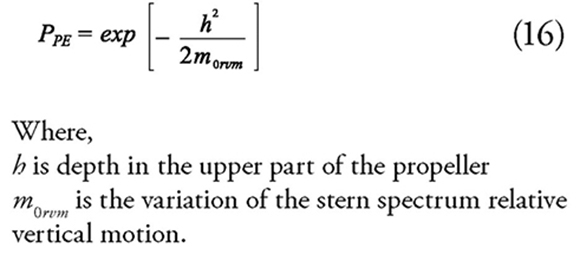
The purpose of this event is to identify the probability of propeller emersion, which should be limited to a 5% occurrence. A great risk for the vessel arises when it enters severe ocean conditions and the propeller emerges, since this causes an excess load on the bearings and coupling gears of the engine.
Using the Rayleigh distribution we can obtain the probability of propeller emersion occurring in some wave incidence conditions, according equation 16, below.
Environmental condition
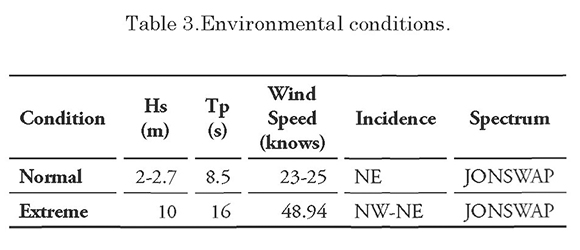
According information to the CIOH [3], there are four areas in the Caribbean Sea with meteoceanographic and weather information for the naval community and in order to generate forecasts, to wit: northwest, southwest, northeast, and southeast. The current area with the largest exploration potential is the southwest, which presents the most severe wind and wave conditions of all this sector. In said area, wave heights range from 2 to 2.7 m according to the forecast bulletins issued by the CIOH [3], the wind came from the northeast at 23-25 knots, the time of the year chosen as an example is January, which represents an extreme condition for such region.
For the extreme Caribbean conditions, we will consider the data gathered during hurricane Emily in 2005, since it brought 7 meter waves with 16 second periods, 400 meter wavelengths, a phase speed of 25.18 meters per second (48.94 knots).
and group speeds close to 13 meters per second (25.26 knots). The predominant direction of the waves in this part is due north, ranging between NW and NE (330°-030) [4].
Considering the above characteristics of the waves for the Caribbean region, we will choose two conditions to analyze in accordance with one for normal conditions where the wave heights will range between 2 and 2.7 m and a second one for extreme conditions, where the waves will be 7 m high, resembling a hurricane. The selected spectrum is JONSWAP, adjusted to those ocean conditions, data detailed in table 3.
Case Study
Due to the development seen in the country’s oil industry, and the imminent investment of the large oil companies and drilling in offshore reservoirs in the Caribbean, we decided to focus this analysis on the design of a vessel to provide logistics support to offshore operations (PSV)., as shown in Fig. 6.
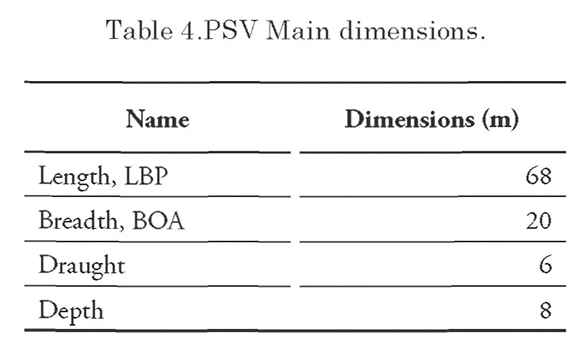
Fig. 6 shows the basic PSV hull geometry and table 4 the main dimensions. The vessel will undergo the sea behavior analysis in the Caribbean, in accordance with the defined environmental conditions.
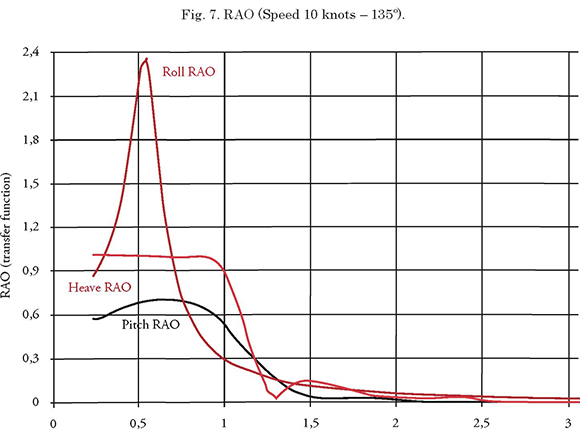
Fig. 7 shows the RAO for heave, pitch, and roll for a speed of 10 knots and a 135° angle when meeting the waves.
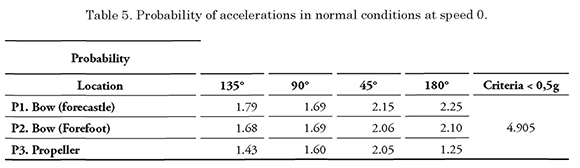
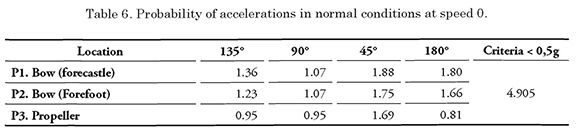
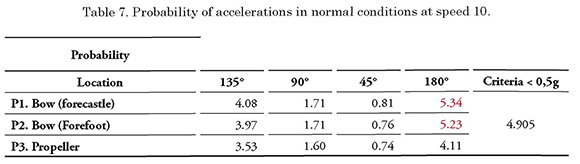
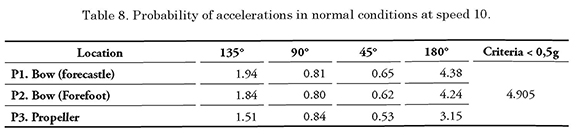
Seakeeping criteria were analyzed from normal and extreme environmental of Caribbean Sea condition. Tables from 5 to 17 below are the results of the verifications of probability events for 0 and 10 knots, and 180°, 135°, 90°, 45°, and 0 incidences.
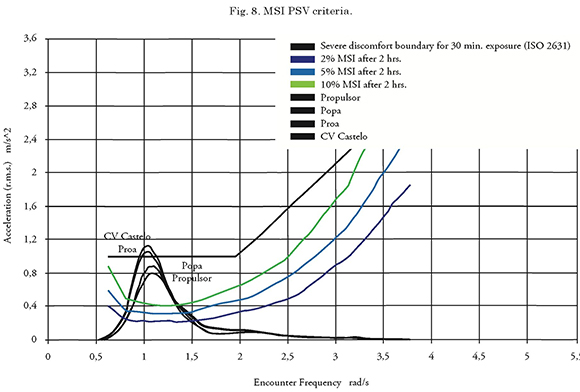
MSI results according Fig. 8 are expressed in terms of the level of acceleration causing motion sickness to 10% of the people on board during a specific time interval.





Conclusions
This study defines a series of criteria based on limit values and probabilities, and enables the analysis of the behavior at sea of a PSV type vessel. Each criteria is evaluated for a selected vessel in locations defined as critical at different incidence angles, speeds, and environmental conditions, set as normal and extreme for a region of interest in the Caribbean Sea.
In regards to the results shown, some criteria are not met for the studied vessel. For the accelerations, there are very few values that exceed the limit of the criteria. The values exceeding this limit are found in the forecastle and forefoot at a speed of 10 knots and in a normal environmental condition at a 180° angle. It is noteworthy that the values in these same locations, but in the extreme condition, are close to the limit of the criteria.
The water on deck criteria shows values that exceed the limit in both environmental conditions and speeds. The larges values exceeding this criteria correspond to zero speed and at 90° and 45° angles; in the case of the extreme condition, the angle is 90°. For the 10 knot speed, noncompliance with the criteria is lower, since at those wave heights and vessel speed it is impossible to have no water on the main deck, forecastle bow, and stern.
The probability of propeller emersion shall not exceed 5% and only one condition exceed the criteria, the normal environment condition at zero speed, with a 45° entry angle.
The hydrodynamic impact or slamming shows few times the criteria limit is exceeded, not exceeding 1%, and this is largely reflected in the 45° angle and in the extreme condition for each assessed speed (0 and 10 knots).
Recommendations to modify the design of the hull and internal mass distribution for PSV type vessels, aimed at meeting the criteria presented in this study, will be the subject of future works and development proposals.
Bibliography
BRETCHNEIDER C. L. Wave variability and Wave spectra for windgenerated gravity waves. Tech memo No. 118 CERC USA. (1959)
BHATTACHARYY, R. Dynamics of Marine Vehicles. Edition xx. John Wiley & Sons, Inc. 508 R 1978.
CIOH, OCEANOGRAFIA OPERACIONAL. Oleaje del mar Caribe, [web on-line]. Available at: http://www.cioh.org.co/meteorologia/CaribWan2, January 31, 2015.
GUTIERREZ. GUSTAVO ADOLFO. Estudio de la evolución temporal del espectro de olas bajo condiciones atmosféricas severas, [web on-line]. Available at: hhttp://at: http://www.academia.edu/6129678/An%C3%A1lisis_de_espectro_de_energ%C3%ADa_de_oleaje_bajo_condiciones_atmosf%C3%A9ricas_severas_en_el_Caribe_Colombiano, recovered: June 14-17, 2005.
GRAHAM, R. “Motion-Induced Interruptions as Ship Operability Criteria,” Naval Engineers Journal, pp. 65—71, March 1990.
GRIFFIN, M. J. Sea sickness. AGARD Conference on Motion Sickness. 1984.
GRIFFIN, M. J. Physical Characteristics of stimuli provoking motion sickness. AGARD Conference on Motion Sickness. 1984.
HASSEMAN, K., and BARUETT, T. P. and others: "Measurements of wind wave growth and swelt decay during the Jonswap". Deustche Hidro. Zeitschirft, Reilie A (8.°). No. 12, 1973.
Más inversiones petroleras. Carta petrolera. (113). 5 P. 2005
MORALES, O. Diseño hidrodinámico de embarcaciones de apoyo offshore para el Caribe colombiano. Colombia. Fecha. 40 diapositivas, col.
NEUMANN, G.:"On ocean wave spectra and a new method of forecasting wind generated sea". Tech. Mem. No. 43. Beach Erosion Board. Corps of Engineers. Washington D.C.1953.
International Standards Organization.
Mechanical vibration and shock Evaluation of human exposure to whole-body vibration—Part 1: General requirements. ISO 2631-1: 1997 standard. 1997O'HANLON, J.F. y McCauley, M.E. Motion sickness incidence as a function of frequency and acceleration of vertical sinusoidal motion. Aerospace Medicine, 45. 1974.
RAWSON, K. J. Basic Ship Theory. Edition 5. Butterworth-Heinemann.784p. 2001. ISBN 9780750653985.
Seakeeper user manual, formation design system. 2007.
ST DENIS, M. AND PIERSON, W.J. On the motions of ships in confused seas. Transactions of the Society of Naval Architects and Marine Engineers. 1953.
Tayrona, el foco principal. Carta petrolera. (113). 13 P. 2005