
Development of a Comparison Method of Sonar Systems for Surface Platforms
Desarrollo de un método de comparación de sistemas de sonar para plataformas de superficie
Andrés Cortes Ciro1
Ennio Emanuel Pinzón Villarroel2
Abstract
This work sought to study the models of acoustic signal propagation in marine environments according to open literature currently available, by interpreting the different effects occurring during their propagation and their characteristic principal parameters; identifying models of underwater acoustic propagation that may occur and its corresponding simulation for its understanding. Software, denominated BELLFAT, was developed in Matlab, which permits predicting, evaluating, and analyzing the capabilities of an active sonar system. Such can function by taking depth, temperature, salinity in the sea of any reference area and the characteristics of the sonar to evaluate. Thus, this computational tool is established to study marine sonar systems sought to be developed or as a key piece to establish the characteristics active sonar must have for the purposes of a surface platform.
Key words: sonar systems, acoustic wave, propagation, simulation, Matlab.
Resumen
Se estudiaron modelos de propagación de señales acústicas en entornos marinos de acuerdo a la literatura abierta disponible en la actualidad, interpretando los diferentes efectos que se presentan en su propagación y sus principales parámetros que la caracterizan; se identifican modelos de propagación acústica bajo el agua que se pueden presentar y su correspondiente simulación para su entendimiento. Se desarrolló un software en Matlab denominado BELLFAT que permite predecir, evaluar y analizar las capacidades de un sistema de sonar activo. Este último puede funcionar tomando la profundidad, temperatura y salinidad en el mar de cualquier área de referencia y las características del sonar a evaluar. De esta forma, se establece esta herramienta computacional para el estudio de sistemas de sonar marítimo que se pretenda desarrollar o como pieza clave para establecer las características que debe tener un sonar activo para los propósitos de una plataforma de superficie.
Palabras claves: sistemas de sonar, onda acústica, propagación, simulación, Matlab.
Date Received: June 17th, 2014 - Fecha de recepción: 17 de junio de 2014
Date Accepted: August 22th, 2014 - Fecha de aceptación: 22 de agosto de 2014
________________________
1 Teniente de Fragata de la Armada Nacional. Escuela Naval de Cadetes “Almirante Padilla”, Colombia. e-mail: apande80@gmail.com
2 Teniente de Fragata de la Armada Nacional. Escuela Naval de Cadetes “Almirante Padilla”, Colombia. e-mail: ennionavy@hotmail.com
............................................................................................................................................................
Introduction
The National Navy plans to design and construct via its own means through the Science and Technology Corporation for the Development of the Naval, Maritime, and Riverine Industry (COTECMAR), the replacement of current ‘Almirante Padilla’ class light frigates, through the project Strategic Surface Platform (SSP) broadly supported by the National Ministry of Defense. Their naval structure must have a vital optimum sonar system to carry out its functions in the operations area that adjust to time, environment, space, and scenario [1].
Currently, some countries have been conducting research on sonar systems through their military academic centers to construct their devices and not depend upon transnational private industry. This has generated the development of software that permits evaluating the behavior of said equipment according to the purpose and specific conditions of the marine environment. Information on the development of these programs is quite scarce and the little there is has been available through research centers that study the behavior of the sound propagation phenomenon, but not based on the parameters of a sonar system that permits predicting their performance. Among these entities, there is the Center for Marine Science and Technology at Curtin University in Australia, which openly share their development of the “acoustic toolbox” tool by Matlab for academic purposes [2]. It is called AcTUP and, along with PROPAS, is used by the Naval School’s Faculty of Oceanography, are the only tools currently available in open literature.
The first section describes acoustic propagation models in underwater environments and the simulation tools now available in open literature. The second section defines the necessary parameters that characterize the Colombian marine environment and certifies data gathering at a given reference area through the National Navy’s Center for Oceanographic and Hydrographic Research (CIOH, for the term in Spanish). The third section briefly describes the development of an interface in Matlab that will permit validating, studying, and evaluating the performance of active sonar according to the information collected per the mathematical formulas defined in the text “Principles of underwater sound” by Robert Urick, considered the main bibliographical source on the topic. Thereafter, the fourth section compared the results obtained from the software developed, called BELLFAT, with the literature – permitting precision and validity. Finally, in the conclusions, this software permits implementing a comparison method of sonar systems for surface platforms in the National Navy.
Materials and Methods
This degree work was a non-experimental transactional research. As described by Aparicio and García in their research on acoustic signals in submarine environments: “diverse mathematical models exist to study acoustic propagation in underwater environments, highlighting raytracing models … the ray-tracing model is based on the consideration that the wave energy can be concentrated in defined paths, so that we may think of rays rather than waves… the ray-tracing model calculates the equations followed by the rays, as well as the pressure field they generate from which transmission losses may be obtained, along with the propagation time of said rays.”[3]
Parameters of Underwater Acoustic Propagation
Speed of Sound
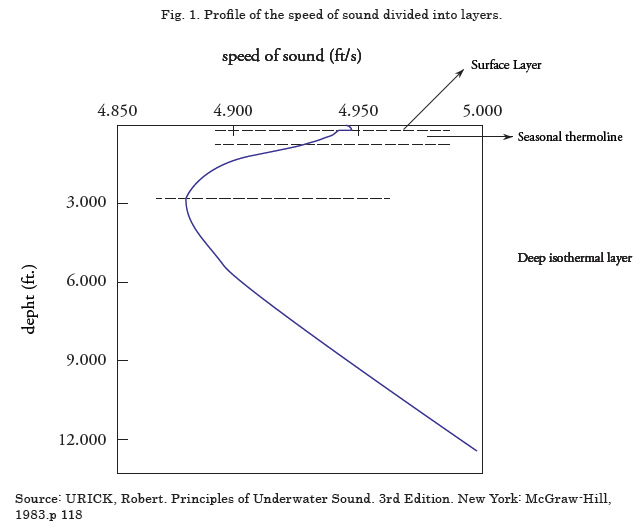
The speed of sound in the sea is an oceanographic variable that determines several characteristics from the environment of the transmission of sound. It varies according to the season, geographic conditions, depth, and exact location of the given area. The modern experimental method in the direct measurement of the speed of sound uses laboratory techniques under carefully controlled conditions. All the methods determine the speed of sound in terms of three basic quantities, which are: temperature, salinity, and pressure [4]. We took as reference that developed by Medwin [5].
Limits:
0 ≤ T ≤ 35° (Temperature in Celsius)
0 ≤ S ≤ 45 (Salinity in parts per thousand)
0 ≤ D ≤ 1,000 (Depth in meters)
Within the observation field of the speed of sound in underwater environments, two devices are used that determine the profile of the speed of sound. One of these specialized equipments is the bathythermograph, which measures temperature in function of depth as it descends into the sea; the other is the sound profiler, which measures directly the speed of sound in terms of time over a constant fixed trajectory [4].
Transmission losses
When an acoustic propagation through the sea is originated, the signal’s intensity is reduced, deriving in considerable loss of power. Diminished intensity indicates transmission losses (TL). The total propagation loss is the difference between the sound intensity at a point near to the source and at a remote point. Propagation losses are due to several causes in which losses through absorption and through expansion of the wavefront stand out. These losses occur with all underwater transmissions. Transmission losses of sound depend on: [6]
• Frequency: affects power losses; this is how the acoustic wave propagates before having lost so much energy, keeping it from making the medium vibrate.
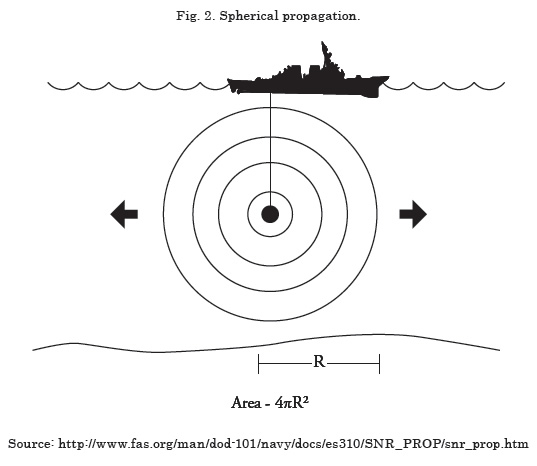
• Expansion: wavefront expansion makes the total energy associated to the wavefront to be distributed within an increasingly greater surface, resulting in an increasingly lower intensity. In uniform and deep waters, sound originally expands in spherical manner (Fig. 2, spherical propagation) and its intensity diminishes proportionally with distance squared. The energy generated by the source is radiated equally in all directions to be distributed uniformly over the surface of a sphere surrounding the source [4].
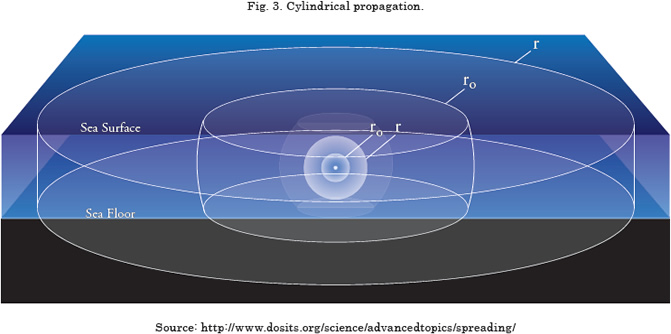
When sound has propagated a distance approximately equal to the depth, it behaves as if it was in a conduit and the propagation becomes cylindrical where intensity diminishes directly with distance (Fig. 3). Th e medium has a parallel plane with upper and lower limits; the diff usion is no longer spherical, given that sound cannot cross the limiting planes [6].
• this process converts acoustic energy into heat. Hence, it represents a true loss and for sound to propagate through the underwater environment, it must be moved.
Bearing in mind all the contributions seen, transmission losses may be expressed according to equations [4]:
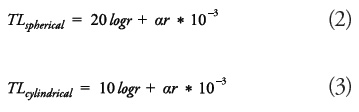
Where distance, r, is where losses need to be measured (generally in the receptor) and α is the absorption coefficient expressed according to the equation:

where α is given in decibels per kilo-yard and f is the frequency in kilohertz.
Transmission Models
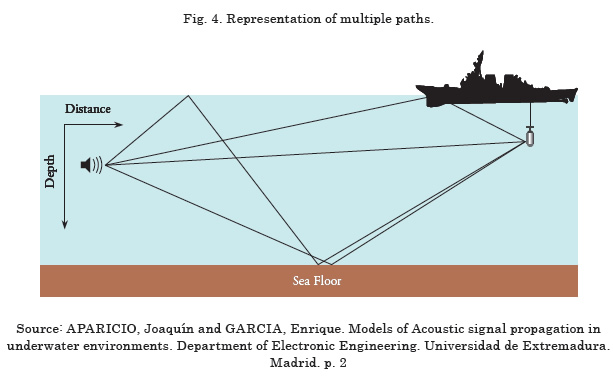
Sound always travels great distances beneath the sea through some form of the surface duct (multiple paths, Figure 4). When sound travels in a duct, or sound channel, propagation is prevented in all directions and remains confined between the sound channel’s dividing lines [4]. These models are mainly classified into the surface channel, the sound channel, rebounds on the bottom, the convergence zone, and propagation in shallow waters.
Simulation Tools
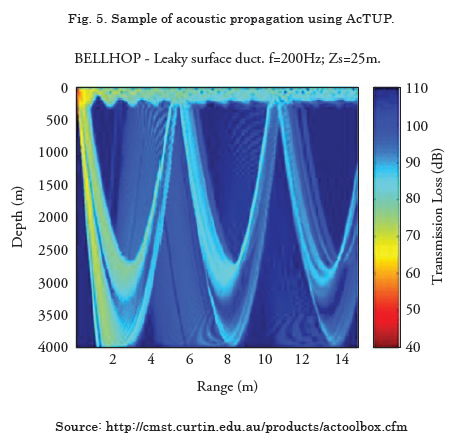
Currently, simulation tools of sonar performance in open literature is null; however, an application exists (AcTUP v2.2L) that works with Matlab and permits analyzing the behavior of the sound propagation phenomenon in underwater environments, but not based on the measurement parameters that characterize a sonar system [2]. AcTup has been evolving during the last 15 years and through the Centre for Marine Science and Technology (CMST) at Curtin University in Australia who kindly share the application through their web page for the academic community. This program permits analyzing the operation of the different acoustic propagation models (Fig. 5) and tracing their results.
Another tool, similar to the one already described exists, but it is not available in open literature. It may be accessed through the Faculty of Physical Oceanography at the Almirante Padilla Naval School of Cadets; this tool is called PROPAS and was developed in Fortran programming language. Unfortunately, this programming language is not currently very popular and hinders its execution.
Necessary Parameters for Characterization of the Colombian Marine Environment
In the observation fi eld of the speed of sound in the underwater environment two devices are used that determine the profi le of the speed of sound. One of these specialized devices is the bathythermograph, which measures temperature in function of depth as it descends in the sea; the other device is the sound velocity profi ler directly measures the speed of sound in terms of time over a constant fi xed trajectory. Physical characteristics of the marine environment, like density, pressure, and salinity aff ect mostly speed of sound. [4].
Colombia is the only country in South America with borders on two oceans and has a strategic geographic position, which allows it to have links with the rest of the countries in the northern and southern hemispheres. Th e Caribbean coast has a longitude of 1600 km and a marine area of 589,169 km2. Th e Pacifi c coast has a longitude of 1300 km and a marine area of 339,500 km2, which makes a total of 2900 km of coastline and 928,660 km2 of marine territories [7].
Colombian Caribbean
Th is area is located in what is denominated as the Colombian pan with depths up to 4000 m. Its climate is regulated by the changing location of the Inter-Tropical Convergence Zone (ICZ) and by the eff ect of the trade winds from the north east, which determine during the year two well-defi ned periods: a rain period from May to November and a dry period from December to April, with some local variations in diverse sectors, given the topographical characteristics of each [7]. Th e Caribbean coast is characterized for having warm waters, with a mean temperature of 26 °C [8].
Colombian Pacifi c
Th e weather in the Colombian Pacifi c is notably infl uenced in a region of low atmospheric pressure, where the trade winds converge forming the Inter- Tropical Convergence Zone. Th is causes air masses with diff erences in temperature and humidity to rise and form clouds that generate continuous and high precipitations and variable winds. Precipitations in the north may reach 8000 mm per year. Th e tides are regular semidiurnal, which means there are two high tides and two low tides during the day, with an approximate period of 12.25 hours. Its range is quite high, slightly over 4 m [7]. Its waters are relatively warm with a mean temperature of 25 °C [8].
Data Collection at Sea
This thesis work based its data on the Guajira Peninsula, Latitude N 12°21'40.68" Longitude W 71° 4'37.35", during the dry period of 2011, with oceanographic data from six stations. This area was chosen because it is considered of strategic interest for the analysis of the results of active sonar in the development of the BELLFAT software. This data consists of values taken from the factors of greatest interest already exposed; this was carried out through the CIOH, which certified that these measurements were taken with suitable measurement instruments that provide reliability and validity to the information.
Software Design in Matlab that permits predicting, evaluating, and analyzing the capabilities of an active sonar
SStarting from the components of the equation of the active sonar and bearing in mind the propagation models and the parameters that characterize the given reference area, commands were designed in Matlab for BELLFAT software.

SL = Noise source level
TL = Transmission loss
NL = Noise level
DI = Directivity index of the system
NRV = Noise reverberation level
TS = Target strength
DT = Detection threshold
Each of these characteristics comprises hundreds of mathematical formulas and considerations, as appropriate.
MATLAB Modeling
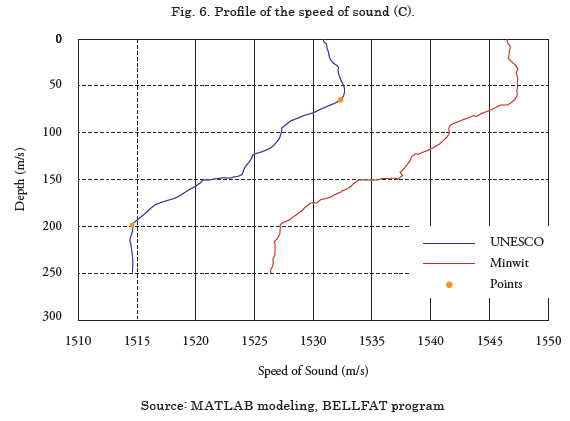
With the information obtained from the CIOH the rate of sound propagation in water (C) can be modeled, as shown in Graph 1. Therein, may be observed the changes of layers in the yellow points at depths of 65 and 198 m.
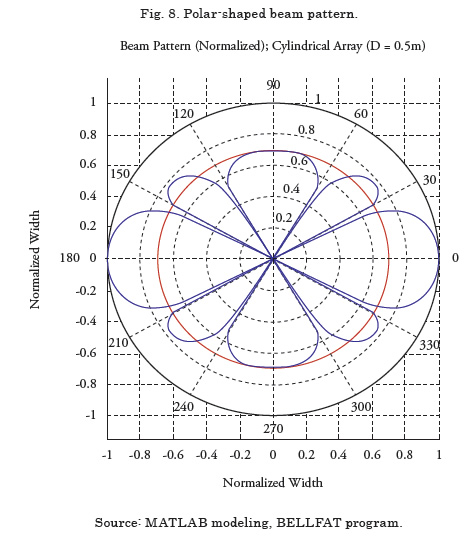
Th e characteristics of a Dipping Sonar from the antisubmarine warfare (ASW) SH-60 helicopter were taken as example:
Type of arrangement: Cylindrical
Diameter: 0.5 m
Frequency: 8 KHz
Depth: 210 m
Power: 400 W
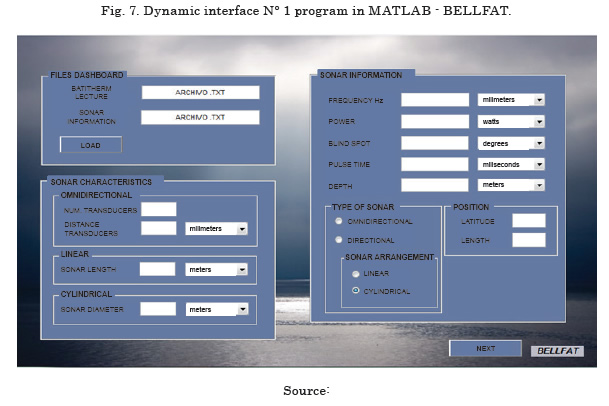
Th rough diff erent user interfaces, the values to perform the calculations are located. Th e Fig. 7 is an example of these. Among the diff erent mathematical operations executed, the following may be graphed, among others. (See Fig. 8)
Similarly, graphs are possible of target strength (TS), detection probability at distance, absorption coeffi cient, etc. Among other benefi ts, tables were tabulated to determine the environmental noise level and, thus, permit greater agility and ease in analyzing the sonar’s behavior.
Comparison of Software results with studies available in the literature
Given that this topic is a research fi eld that is not highly available in open literature, it is rather complex to obtain software similar to that developed in this degree work. Nevertheless, evidence exists that some countries have basic computational tools elaborated to increase studies on these themes and enable the evolution of their processes to design these types of sensors, some of which are named ahead:
- SPARS and MODPRES from the Brazilian Navy.
- MESS from the University of Texas, USA.
- DRDO from India.
Due to this, the software was validated with exercises from the text “Principles of Underwater Sound” by Robert J. Urick, providing results and precise graphics in the diff erent exercises taken as reference.
Conclusions
Diff erent acoustic propagation models were identifi ed, which are presented with the profi le of the speed of sound in underwater environments, understanding the diff erent phenomena that originate them in the diff erent layers that make up the ocean. Likewise, the study identifi ed simulation tools for the analysis of these factors in open literature; however, none was found directly related to the study of sonar performance.
This work also identified the necessary parameters that characterize the Colombian marine environment and, through the Oceanographic and Hydrographic Research Center, relevant data were acquired on depth, pressure, and salinity of a given area for our analyses. This Center certified that the measurement instruments permit providing validity and reliability to the data needed to determine the profile of the speed of sound; information of upmost importance to study sonar systems.
Based on the data gathered and studying the equation of the active sonar, a user interface was designed in Matlab, which permits predicting, evaluating, and analyzing the capabilities of an active sonar, managing to facilitate research on the matter to the academic community.
The BELLFAT software is an assessment tool for the performance of active sonar systems and, hence, its use may be implemented as an appropriate method to study these themes in the Colombian Navy. The BELLFAT software permits becoming a computational tool to be considered in the Electronic Naval Engineering program at Colombian Naval Academy “Almirante Padilla” (ENAP) and the Marine Science program at Noncommissioned Officers' Academy "ARC Barranquilla" (ENSB), increasing their knowledge and improved basic approach of the theme.
References
[1] GOMEZ TORRES, JOSE M: Warship Combat Systems Selection Methodology Based on a Discrete Event Simulation. Monterrey, 2010, 151 h. Thesis (Master of Science Mechanical Engineering). Naval Postgraduate School. Faculty of Naval Engineering. Department of Systems Engineering.
[2] CURTIN UNIVERSITY TECHNOLOGY. Centre for Marine Science and Technology. Available in http://cmst.curtin.edu.au/
[3] APARICIO, JOAQUÍN y GARCIA, ENRIQUE. Modelos de propagación de señales acústicas en entornos subacuáticos. Departamento de Ing. Electrónica. Universidad de Extremadura. Madrid. Available in: http:// www.geintra-uah.org/system/files/models_ de_propagacion_de_senales_acusticas_en_ entornos_subacuaticos_i_y_ii-vdef.pdf
[4] URICK, ROBERT. Principles of Underwater Sound. Third Edition. New York: McGraw- Hill, 1983.
[5] MEDWIN, H. Speed of Sound in Water for Realistic Parameters. Journal of the Acoustical Society of America.1975.p. 58
[6] LABORATORIO DE PROCESADO DE IMAGEN. Available in: http://www. lpi.tel.uva.es/~nacho/docencia/ing_ond_1/ trabajos_04_05/io9/public_html/sonar.html
[7] EL OCÉANO EN LAS CIENCIAS NATURALES Y SOCIALES. Características Generales de los espacios Oceánicos y zonas costeras colombianas. Bogotá D.C.: Cassa Creativa Ltda., 2001. Available in: http:// www.cco.gov.co/ciencias%20naturales/unidad %20nueve.pdf
[8] MAJLUF, PATRICIA. Los Ecosistemas Marinos y Costeros. Proyecto Estrategia Regional de Biodiversidad para los Países del Trópico Andino, 2002. Serie de Informes: p. 9. ATN/JF-5887/ RG (CAN BID). Available in: http:// www. comunidadandina.org/desarrollo/te2.PDF