ROV Design for Pluvial Applications
Diseño ROV para las aplicaciones pluviales
Carlos Lozano1
Max Dutra2
Abstract
Brazil is a country where disaster levels increase each year due to changing climatic conditions, principally in the south east region. Disorganized occupation in urban areas, with inadequate structures increases the probability of these disasters. This work sought to study environments with high levels of $oods and river over$ow by using a robot, which could monitor the soil of possibly polluted rivers, as well as sediments and detritus. This work shows a proposal for a mechanical structure that will be used as a prototype for future developments. Two different alloys of materials and dimensions were tested for the same structure; the first one is "2024-T4" aluminum, and second one is "ASI 316” steel. The best results in terms of safety factor (SF) were obtained with the aluminum alloy with 4.64 SF. The structure shows mechanical characteristics that allow the usability for the proposed application; Solid Works was used for tests and designs.
Key words: ROVFLUV, Applied Robotics, Mechanical Design, Environmental Protection, Structure Analysis
Resumen
Brasil es un país donde los niveles de desastres aumentan cada año debido a las condiciones climáticas cambiantes, principalmente en la región sur oriental. La ocupación desorganizada en áreas urbanas, con estructuras inadecuadas aumenta la probabilidad de estos desastres. Este trabajo pretende estudiar los entornos con altos niveles de inundaciones y desbordamiento de ríos mediante el uso de un robot, que pueda monitorear los suelos de ríos posiblemente contaminados, así como sedimentos y detrito. Aquí se muestra una propuesta para una estructura mecánica que se utilizará como prototipo para desarrollos futuros. Se probaron dos diferentes materiales de aleaciones y diferentes dimensiones para la misma estructura; el primero fue aluminio "2024-T4", y el segundo fue acero "ASI 316”. Los mejores resultados en términos de factor de seguridad (SF, por su sigla en inglés) se obtuvieron con la aleación de aluminio con 4.64 SF. La estructura muestra características mecánicas que permiten su utilización para la aplicación propuesta; Solid Works se utilizó para las pruebas y los diseños.
Palabras claves: ROVFLUV, Robótica aplicada, Diseño mecánico, Protección ambiental, Análisis estructural
Date Received: November 7th, 2012 - Fecha de recepción: 7 de Noviembre de 2012
Date Accepted: February 7th, 2013 - Fecha de aceptación: 7 de Febrero de 2013
________________________
1 Mechanical Department - Federal University of Rio de Janeiro, Rio de Janeiro - Brazil. e-mail: krloslozano@ufrj.br
2 Mechanical Department - Federal University of Rio de Janeiro, Rio de Janeiro - Brazil. e-mail: max@coppe.ufrj.br
............................................................................................................................................................
Introduction
Floods represent a big problem in the Brazilian south and south-east regions. Due to unplanned occupation of river lands, the Brazilian populations must endure $oods and mudslides [1, 2]. Furthermore, human, environmental, and material damage changes the region’s vulnerability.
The level of soil on river beds is a variable that can be used to measure the degree of danger areas near rivers, given that this is dependent on the amount of water that the bed has in a specified interval of time.
The autonomous vehicle [3-7], object of this project, consists of a system that provides monitoring of river beds compare to [8, 9], through the detection of significant changes in ground levels, as done in [8, 10, 11]; also, with data transmission over wireless networks. Based on the technology of embedded systems, the autonomous vehicle will also get information related to physical and chemical conditions of the water (temperature, density, salinity, pH, and other variables) [12, 13]. The vehicle will also have the functionality of remote handling when the system detects any abnormalities or changes in the environment and the solution depends on human intervention [9]. Therefore, a communication interface is established based on wireless networks (IEEE 802.11), optical networks and/or sensor network (IEEE 802.15.4E) and mesh networks. This interface will provide greater $exibility to the autonomous vehicle, facilitating its configuration and operation in areas of di#cult access [12, 14].
Future modifications will be included (the projection of a decision center, oriented environmental monitoring), which will add value to the project to process the information perceived by the autonomous vehicle and use of disaster prevention.
This work will be present a proposal for a mechanical structure that will be used as a prototype for future developments.
Materials and Methods
For the present application, Solid-Works software was used, along with analysis tools through finite elements. Two materials were tested: 2024-T4 (ASME) aluminum alloy and L316 alloy steel (AISI). Further, we used two structures of different dimensions to validate different behaviors.
Material Properties
The first material used was the aluminum alloy known as aeronautical construction material (2024- T4), whose composition includes: Al: 90.7%, Cr: 0.1%, Cu: 4.9%, Fe: 0.5%, Mg: 1.8%, Mn: 0.9%, Si: 0.5%, Ti: 0.15%, Zn: 0.25%. Aluminum alloys are well known in different applications for their properties for machinability and surface finish, with high strength and adequate workability. They are used in structural applications, like, aircraft fittings, fuse parts, hydraulic valve bodies, piston rectifier parts, worm gears, fastening devices; in this application aluminum was used because the environment where the robot will operate presents high pressure and corrosion conditions due to the depth and chemical components of the water.
The second material used was 316-L stainless steel; the characteristics for this material include good cold formability and high strain hardening capacity. Generally, it is not magnetic, but may have small amounts of ferrite; thereby, presenting mild magnetism. When cold-deformed, it becomes partially martensitic and lightly magnetic. It is very ductile. Machinability is considered bad except for steels and resulfurized CORFaC. Corrosion resistance: shows high resistance means in acetic acid, sulfuric 1% picric, nitric, oleic acid, formic acid, boric acid, benzoic acid and chromic at 20 °C. Good resistance means in concentrated acetic acid at 70 °C, citric acid, 10% oxalic acid, phosphoric acid at 100 °C, 5% sulfuric acid at 20 °C. Saline solutions: chlorides of magnesium, calcium, zinc, potassium permanganate, potassium sulfate at 20 °C, nitrate, cyanide and copper acetate. Applications in sea water: good resistance at 20 °C. Water: good resistance at any temperature.
Structure
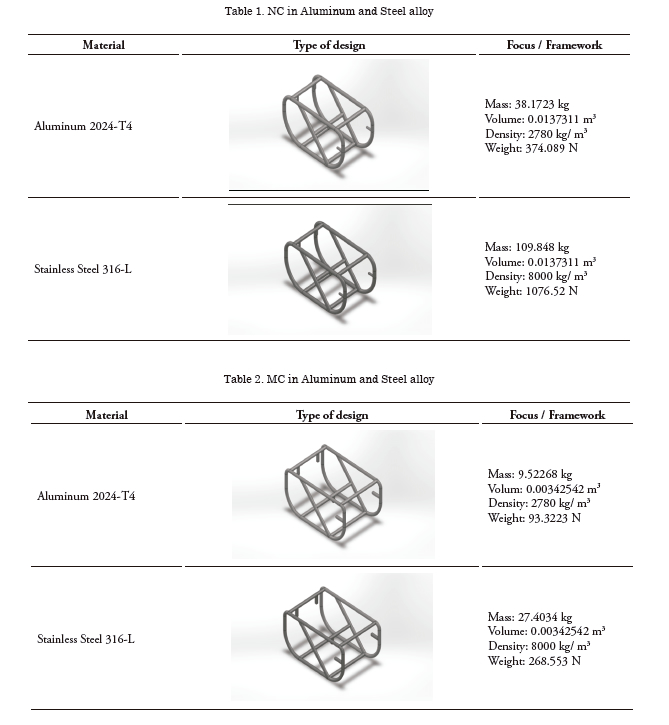
For the structure, a tubular profile was used with two different diameters, which will from now on be known as minor-car (MC) and normal-car (NC). The MC has an external diameter of 0.03 m and internal wall of 0.005 m; the NC has an external diameter of 0.05 m and internal wall of 0.01 m.
For NC, the principal volumetric properties for both materials were obtained, shown on Table 1.
Also, for MC, the principal volumetric properties for both materials were obtained, shown on Table 2.
Forces Applied
Both of structures were tested with the same applied forces (78.5 N + 38.5 N); forces represent the maximum forces due to the four thrusters propulsion, and the second force is relative to the force that a generator will add to the structure. And pressures (2.354.400 N/m^2) come from the maximum application of the robot in the extreme river depth observed, which is 240 m. The structure was also fixed on two components representing the ground connection between the car and the soil of the water.
Results
This work tested four models (two for each material NC and MC); each model with the same conditions represents different behaviors, as expected. Results for aluminum in NC and MC are presented for both of the structures; furthermore, the results obtained for the steel alloy will be presented.
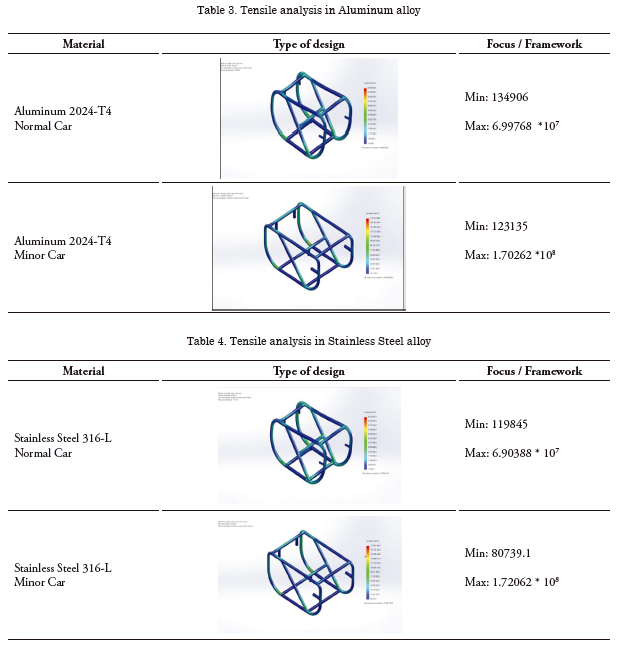
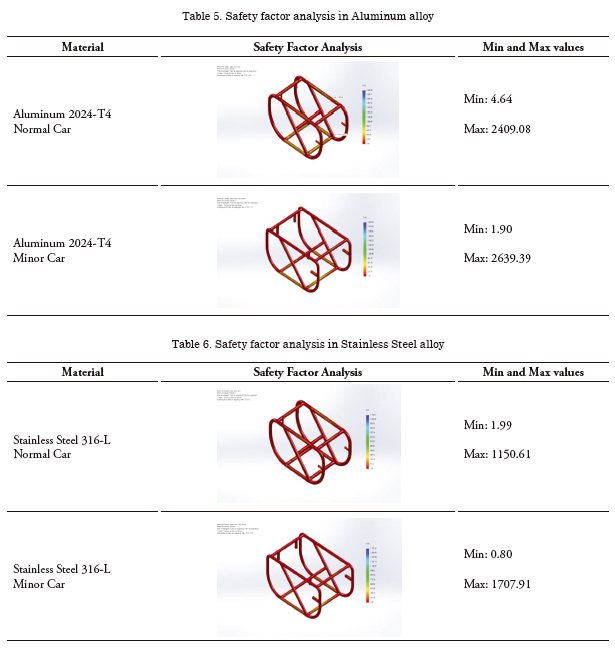
Both structures were tested and analyzed in two ways, tensile analysis (Tables 3 and 4) and safety factor analysis (Tables 5 and 6). They were obtained from Von Misses theorem; these results were calculated with Solid Works tools through finite element analysis.
Conclusion
The results were analyzed in terms of minimum tension (MT) and safety factor (SF); the best result was obtained with the aluminum alloy with 134.906 of MT and 4.64 in SF, which refer to the NC structure. This represents that the structure has mechanical characteristics that allow its use for the proposed application.
It was very important for this study to apply the Solid Works environment for design and test analysis; its properties facilitated the process and its changes, which will improve the structure for the final purpose.
Future works will improve in the structure of new equipment and components, so, the models will have to be re-validated for new configurations or changes that could arise.
Acknowledgements
We thank Capes, CNPq for doctoral scholarships and financial help for investigation.
References
1. MACHADO, M.S., MACHADO, S.W.S., COHEN, S.C., “A rota das chuvas em Petropolis: cenário de uma inundação”, V Seminario Internacional de Defesa Civil – DEFENCIL, Ananis Eletrônicos. São Paulo, Novembro, 2009.
2. CONFEDERAÇÃO NACIONAL DE MUNICÍPIOS, “Desastres naturais no Brasil, Analise das portarias de Situação de Emergência e Estado de Calamidade Pública de 2003 a 2010”. Estudo Técnico/ CNM – Maio de 2010”, available in: http://portal.cnm.org.br/sites/9000/9070/ E s t u d o s / P l a n e j ame n t oUr b a n o / DesastresNaturaisnoBrasil-CNM.pdf, Access in: 03/04/2011.
3. KIM, J.,HAN, J., CHUNG, W.K., YUH, J., LEE, P. M., “Accurate and Practical Thruster Modeling for Underwater Vehicles”, Proceedings of the 2005: IEEE International Conference on Robotics and Automation, pp. 175-180, 2005.
4. SAAB SEAEYE LTD. DATASHEET OF SEAEYE FALCON & FALCON DR. http:// www.seaeye.com/falcon.html, access in: 30/03/2011.
5. GRIFFITHS, G., JAMIESON, J., MITCHELL, S., RUTHERFORD, K., “Energy storage for long endurance AUVs”, In, Advances in Technology for Underwater Vehicles, Conference Proceedings, March 2004.
6. JALBERT, J., BAKER, J., DUCHESNEY, J., PIETRYKA, P., DALTON, W., BLIDBERG, D.R., CHAPPELL, S., NITZEL, R., HOLAPPA, K., “A Solar-Powered Autonomous Underwater Vehicle”, in: Proceedings of OCEANS 2003, v. 2, pp. 1132-1140, 2003.
7. DEWIJS, B., “Auv/Rov Propulsion Thrusters”, IEEE Conference and Exhibition OCEANS 2000 MTS., v. 1, pp. 173 – 176, Provience, RI, USA, September 2000.
8. NEWMAN, J.B., STAKES, D., “Tiburon: Development of a n ROV for Ocean Science Research”, OCEANS '94, Oceans Engineering for Today's Technology and Tomorrow's Preservation, Proceedings, v.2, pp. II/483 – II/488, Septembro, 1994.
9. BINGHAM, D., DRAKE, T., HILL, A., LOTT, R., “The Application of Autonomous Underwater Vehicle (AUV) Technology in the Oil Industry – Vision and Experiences”, in: XXII FIG International Congress, pp. 1-13, Washington –DC, USA, 2006.
10. MARCO, D.B., HALEY, A.J., “Current Developments in Underwater Vehicle Control and Navigation, The NPS ARIES AUV”, IEEE Conference and Exhibition Oceans 2000 MTS, v.2, pp. 1011-1016, September 2000. USA.
11. CHOI, S.K., EASTERDAY, O.T., “An Underwater Vehicle Monitoring System and Its Sensors”, Lecture Notes in Control and Information Sciences, Springer Link, v. 271, pp. 551-560, 2001.
12. AKYLDIZ, I.F., POMPILI, D., MELODIA, T., “Underwater acoustic sensor networks: research challenges”, Elsevier, pp. 257-279. February 2005.
13. CHU, J.S. LIEBERMAN, A.,DOWNS, P. “Automatic camera control for AUVs: A Comparision of image Assessment Methods”, Proceedings of the 1992 Symposium on Autonomous Underwater Vehicle Technology, pp. 191-201, Washington DC, USA,1992.
14. FLETCHER, B. “UUV Master Plan: A Vision for Navy UUV Development”, IEEE Conference and Exhibition Oceans 2000 MTS, v.1, pp. 65-71, September 2000. USA.